포물선 운동
덤프버전 :
분류
1. 개요[편집]
projectile motion · 抛物線 運動
중력장이 존재하는 환경에서 물체를 투사했을 때 포물선 궤적을 그리며 운동하는 것을 포물선 운동이라 한다.
1차원 등가속도 운동에 자유도를 더해 차원을 높인 운동으로, 포물선 운동은 대표적인 2차원 운동이다.
이 문서는 가속도 개념과 등가속도 운동 문서의 결과를 모두 숙지하고 있다는 가정 하에 작성되었다.
2. 분석[편집]
우선 공기 저항을 포함한 모든 마찰을 무시한 경우를 보자. 3차원상에서 분석을 할 수도 있지만, 용이한 분석을 위해 2차원으로만 분석하였다.
아래와 같이 [math(\mathbf{v}_{0})]의 속도로 [math(x)]축[1]과 [math(\theta)]의 각으로 물체가 투사된 상황을 고려하자. 이때, 모든 마찰을 무시한다면, 물체는 포물선 궤도로 나아가게 된다. [math(\mathrm{A,\,B})]는 각각 궤도의 최고점, [math(\mathrm{O})]에서 투사된 후 다시 [math(x)]축에 도달한 점이다. [math(\mathrm{H})]는 점 [math(\mathrm{A})]에서 [math(x)]축에 내린 수선의 발이다.

질량 [math(m)]의 물체는 [math(y)]축 방향으로 알짜힘인 중력 [math(\mathbf{F}=-mg \mathbf{\hat{y}})]만을 받는다. 따라서 물체는 [math(y)]축으로 가속도 [math(\mathbf{a}=-g \mathbf{\hat{y}})]인 등가속도 운동하며, [math(x)]축 방향으로의 알짜힘은 없으므로 등속도 운동할 것이다.
물체는 [math(\mathrm{O})]에서 투사되고, 최고점 [math(\mathrm{A})]에 도달한 후 다시 [math(\mathrm{B})]로 떨어지는 시간 동안만 포물선 운동한다. 그런데 물체에 작용하는 비보존력이 없기 때문에 물체의 역학적 에너지는 보존되고, 결국 이는 물체의 속도 크기는 [math(\mathrm{O})]와 [math(\mathrm{B})]에서 같아야 함을 의미한다. [math(x)]축 방향은 등속도 운동하기 때문에 [math(\mathrm{O})]와 [math(\mathrm{B})]에서 속도의 [math(x)]성분은 같다. 그런데, [math(y)]축으로는 중력 가속도의 크기로 등가속도 운동하기 때문에 결국 [math(\mathrm{B})]에서 속도의 [math(y)]성분은 크기는 같으나, 부호는 반대가 된다. [math(\mathrm{O})]에서 투사될 때, 초기속도의 [math(y)] 성분은
임을 고려하면, 결국 구하는 시간 [math(T)]는
[math(-v_0\sin\theta=-gT+v_0\sin\theta \,\to \, T=\dfrac{2v_0\sin\theta}g)]
이다. 다음으로, 수평 도달 거리라 부르는, 물체가 투사된 후 다시 [math(x)]축에 닿을 때까지 이동한 [math(x)]축상의 거리 [math(\overline{\mathrm{OB}} \equiv R)]를 구해보자. 물체는 [math(x)]축으로 등속도 운동하고, 투사될 때 초기속도의 [math(x)] 성분은
[math(\displaystyle \mathbf{v}_{0} \boldsymbol{\cdot} \mathbf{\hat{x}}=v_{0}\cos{\theta})]
임을 고려하면, 물체는 포물선 운동하는 시간 [math(T)] 동안만 운동하므로,
[math(R=v_0T\cos\theta=\dfrac{v_0^2\sin2\theta}g)]
가 된다. 여기에서는 삼각함수 항등식 [math(\sin{2 \theta}=2\sin{\theta}\cos{\theta})]를 썼다.
또, 최고점 높이 [math(\overline{\mathrm{AH}} \equiv H)]를 구하자. 이것은 [math(\mathrm{O \to A})]로 운동할 때, [math(y)]축 방향의 운동만 고려함으로써 쉽게 구할 수 있다. 점 [math(\mathrm{O})]에서 물체는 초기속도 [math(y)] 성분 [math(v_0\sin\theta)]를 가지고 있었고 최고점 [math(\mathrm{A})]에 도달하면 여기에서 속도의 [math(y)] 성분은 없으므로 다음이 성립한다.
[math(\begin{aligned}-2gH&=0-v_0^2\sin^2\theta\\H&=\dfrac{v_0^2\sin^2\theta}{2g}\end{aligned})]
마지막으로 궤도 방정식을 구하자. 물체의 위치는 시간의 매개변수로, 다음과 같다.
[math(\displaystyle \begin{aligned} x(t)&=v_{0}t\cos{\theta} \\ y(t)&=v_{0}t\sin{\theta}-\frac{1}{2}gt^{2} \end{aligned} )]
이 두 식에서 [math(t)]를 소거함으로써 다음의 궤도 방정식을 얻는데, 결과로써도 궤도는 포물선임을 얻는다.
[math(\displaystyle y(x)=x\tan{\theta}-\frac{gx^{2}}{2v_{0}^{2}\cos^{2}{\theta}})]
또한, 속도는 위치의 미분이므로, 포물선 운동 중 물체 속도의 [math(x)]축, [math(y)]축 성분은 각각의 좌표의 시간에 대한 미분이므로
[math(\begin{aligned}\dot x&=v_0\cos\theta\\\dot y&=v_0\sin\theta-gt\end{aligned})]
속도의 크기는 다음과 같다.
[math(v=\sqrt{\dot x^2+\dot y^2})]
아래는 이상의 내용을 요약한 것이다.
- 포물선 운동 시간: [math(T=\dfrac{2v_0\sin\theta}g)]
- 수평 도달 거리: [math(R=\dfrac{v_0^2\sin2\theta}g)]
- 최고점 높이: [math(H=\dfrac{v_0^2\sin^2\theta}{2g})]
- 궤도 방정식: [math(y(x)=x\tan\theta-\dfrac{gx^2}{2v_0^2\cos^2\theta})]
첨언하면, 위의 포물선 운동은 가장 간단하고 이상적인 경우를 다뤘음에 유의하여야 한다. 실제론 [math(\mathrm{B})]에 도달했을 때, 물체의 운동을 방해하는 요소가 없다면, 물체는 궤도 방정식을 따라 계속 포물선 운동한다. 아래의 그림을 참조하자.

또한, 위의 공식들은 최고점을 기준으로 궤도가 대칭일 때만 쓸 수 있다는 것에 유의해야 한다. 예를 들어, 위 상황에서 [math(\mathrm{B})] 이후의 운동은 위의 공식들로 분석할 수 없으며, 포물선 운동 특징인 [math(y)]축으로 중력 가속도 크기로, 등가속도 운동하며, [math(x)]축 방향으로는 등속도 운동함을 이용하여 분석하여야 한다.
2.1. 심화[편집]
여러 가지 수학적 분석을 통해 포물선 운동의 특성을 파악할 수 있다. 우선, 초기 속력이 같게 투사되었을 때 수평 도달 거리가 최대가 되는 각을 찾아 보자.
[math(R=\dfrac{v_0^2\sin2\theta}g)]
그런데, 가능한 [math(\theta)][2] 중에서 [math(0\leq\sin2\theta\leq1)]임을 고려하면, 가능한 최댓값은 [math(\sin2\theta=1)]일 때,
이 되고, 결국 찾는 값은 [math(\theta=\pi/4)]이다.
또한, [math(\theta+\theta'=\pi/2)]를 만족시키는 두 각이 있다고 가정하자. 이때, [math(\theta')]로 투사한 경우, [math(\theta'=\pi/2-\theta)]로 쓸 수 있으므로 다음이 성립한다.
[math(R'=\dfrac{v_0^2\sin2\theta'}g=\dfrac{v_0^2\sin(\pi-2\theta)}g)]
그런데, [math(\theta)]로 투사한 경우의 수평 도달 거리는
[math(R=\dfrac{v_0^2\sin2\theta}g)]
이었으므로 [math(\sin(\pi-2\theta)=\sin2\theta)]임을 이용하면,
[math(R=R')]
을 만족시키므로 [math(\theta+\theta'=\pi/2)]를 만족시키는 두 각으로 던졌을 때, 수평 도달 거리는 같다. 다만, 최고점 높이는 상이함에 유의하자.
궤도 방정식
[math(y(x)=x\tan\theta-\dfrac{gx^2}{2v_0^2\cos^2\theta})]
을 분석하는 것에서도 꽤 흥미로운 결과를 얻는다. 위 식 중 [math(x\tan\theta)]는 원점을 지나면서 [math(x)]축과 양의 방향으로 [math(\theta)]만큼의 각을 갖는 직선의 방정식이다. 또한 원점에서 궤도의 접선은 이 직선이 되는데, 이 직선 위의 점의 [math(y)]좌표에서
[math(\dfrac{gx^2}{2v_0^2\cos^2\theta})]
만큼 뺀 값이 결국 포물선 궤도 위의 점의 [math(y)]좌표가 된다. 이것을 그림으로 표현하면 아래와 같다.

그런데 수평 방향으로 [math(x)]까지 이동하는데 걸린 시간을 [math(T)]라 하면, [math(x=v_{0}T\cos{\theta})]로 쓸 수 있다. 따라서
[math(\dfrac{gx^2}{2v_0^2\cos^2\theta}=\dfrac{g(v_{0}T\cos{\theta})^{2}}{2v_0^2\cos^2\theta}=\dfrac{1}{2}gT^{2})]
이것은 곧 뺀 길이가 직선 [math(y=x\tan{\theta})]과 [math(x=x)]의 교점에서 에서 [math(T)]만큼 자유낙하한 거리임을 의미한다.
2.2. 벡터 분석법[편집]
이제 3차원의 포물선 운동을 표현해 보자. 이는 벡터로 분석하는 것이 훨씬 효과적이다.
아래와 같이 중력장 안에서 물체가 포물선 운동을 원점 [math(\mathrm{O})]에서 시작한 경우를 생각해보자. 단, 중력 가속도 벡터 [math(\mathbf{g}=g\mathbf{\hat{g}} )]임에 유의하자.
파일:나무_벡터_포물선 운동_수정.png
그리고, 궤도 위의 한 점 [math(\mathrm{P})]인 경우에서 먼저 속도 벡터 [math(\mathbf{v})]를 분석하자. 이에 앞서 [math(\mathbf{g} \boldsymbol{\cdot} \mathbf{T}=0)]이 성립하는 [math(\mathbf{\hat{T}} )]를 택하자. 편의상 [math(\mathbf{\hat{T}})]는 포물선 운동하는 방향[3] 쪽이 되게 잡는다. 위 그림을 참고하자.
[math(\mathrm{P})]에서 속도 벡터는 아래와 같이 분해 가능하다.
여기서 [math(\mathbf{v_{g}})]는 중력장 벡터 [math(\mathbf{g})]와 평행한 성분, [math(\mathbf{v_{T}})]는 [math(\mathbf{T})]와 평행한 성분이다. 포물선 운동의 특성[4]에 따라 다음이 성립한다.
[math(\begin{aligned}\mathbf{v}&=[(\mathbf{v}_{0} \boldsymbol{\cdot} -\mathbf{\hat{g}})(-\mathbf{\hat{g}})+\mathbf{g} t] -(\mathbf{v}_{0} \boldsymbol{\cdot} \mathbf{\hat{T}})\mathbf{\hat{T}}\\&=\mathbf{\hat{g}} (\mathbf{v}_{0} \boldsymbol{\cdot} \mathbf{\hat{g}}+gt)+\mathbf{\hat{T}}(\mathbf{v}_{0} \boldsymbol{\cdot} \mathbf{\hat{T}})\end{aligned})]
[4] 중력 가속도와 평행한 축은 중력 가속도로 등가속도 운동, 중력 가속도와 수직인 축은 등속도 운동
따라서 만약 [math(\mathrm{O})]에서 [math(\mathrm{P})]까지 [math(t)]만큼 걸렸다면, 점 [math(\mathrm{P})]를 기술하는 위치 벡터 [math(\mathbf{s})]를 찾을 수 있다.
[math(\displaystyle \begin{aligned} \mathbf{s}&=\int_{0}^{t} \mathbf{v} \,dt \\ &=\mathbf{\hat{g}} \left( \mathbf{v}_{0} \boldsymbol{\cdot} \mathbf{\hat{g}}t+\frac{1}{2}gt^{2} \right)+\mathbf{\hat{T}}(\mathbf{v}_{0} \boldsymbol{\cdot} \mathbf{\hat{T}}t) \end{aligned} )]
따라서 이것이 포물선 운동을 벡터로 기술한 것이다. 그런데 통상적으로 쓰는 [math(\mathbf{g}=-g\mathbf{\hat{y}})]를 사용하고, 이를 2차원에 국한하여 [math(\mathbf{\hat{T}}=\mathbf{\hat{x}})]를 사용한다면,
[math(\displaystyle \begin{aligned} \mathbf{s}=&\mathbf{\hat{y}} \left( \mathbf{v}_{0} \boldsymbol{\cdot} \mathbf{\hat{y}}t-\frac{1}{2}gt^{2} \right)+\mathbf{\hat{x}}(\mathbf{v}_{0} \boldsymbol{\cdot} \mathbf{\hat{x}}t) \end{aligned} )]
이므로 맨 위에서 분석했던 결과와 같다.
3. 라그랑주 역학을 이용한 분석[편집]
포물선 운동은 대표적인 2차원 운동이므로 두 일반화 좌표 [math(x,\,y)]로 기술해도 무리가 없다. 이에 대한 일반화 속도는 [math(\dot{x},\,\dot{y})]이다.
물체의 퍼텐셜 에너지는 중력에 의한 것만 있으므로
[math(\displaystyle U=mgy )]
이고, 운동 에너지는 물체의 속도의 크기 [math(|\mathbf{v}|=\sqrt{\dot{x}^{2}+\dot{y}^{2}})]으로 쓸 수 있으므로
[math(\displaystyle T=\frac{1}{2}m(\dot{x}^{2}+\dot{y}^{2}) )]
따라서 물체의 라그랑지안은 다음과 같다.
[math(\displaystyle \begin{aligned} \mathscr{L}&=T-U \\&= \frac{1}{2}m(\dot{x}^{2}+\dot{y}^{2}) - mgy \end{aligned})]
오일러-라그랑주 방정식을 이용해, 각 축의 운동 방정식을 나타낼 수 있다. 즉,
[math(\displaystyle \frac{\partial \mathscr L}{\partial x_{i}} - \frac{d}{dt} \left( \frac{\partial \mathscr L}{\partial \dot{x}_{i}} \right) = 0)]
을 이용하면 다음을 얻는다.
[math(\displaystyle \begin{cases} \ddot{x}=0 \\ \ddot{y}=-g \end{cases} )]
결국 초등적인 방법으로 분석할 때 언급했던 [math(y)]축으로 중력 가속도 크기로 등가속도 운동하며 [math(x)]축 방향으로 등속도 운동한다는 포물선 운동의 특징이 여기서도 나온 것이다.
4. 공기 저항을 고려한 분석[편집]
이제 현실과 가장 유사하도록 공기 저항을 고려하자.[5] 우선 이러한 공기 저항이 물체의 운동량에 비례한다고 하자. 즉, 마찰력을 [math(-mk \mathbf{v})]로 놓는다. 여기서 [math(k)]는 공기 저항 계수가 될 것이다. 이때, 속도는 각 축의 성분으로 분해할 수 있고,
[math(\displaystyle \mathbf{v}=\dot{x} \mathbf{\hat{x}}+ \dot{y} \mathbf{\hat{y}})]
[5] 저항력이 속도에 비례하는 꼴의 식은 물체가 상당히 작을 때 적용되는 식이고, 야구공처럼 표면적 및 질량이 큰 물체라면 저항력이 속도의 제곱에 비례하는 식을 사용해야 한다. 2차원 포물선 운동 상황이라면 해괴한 미분방정식 형태가 되어 해석적으로 해를 구할 수 없다.
따라서 마찰력 또한 각 축의 성분으로 분해될 수 있다.
다음의 초기 조건을 안다.
[math(\displaystyle \begin{aligned} x(t=0)&=0 \\ y(t=0)&=0 \\ \dot{x}(t=0)&=v_{0}\cos{\theta} &&\equiv V \\ \dot{y}(t=0)&=v_{0}\sin{\theta} &&\equiv W \end{aligned} )]
따라서 각 축에 대한 운동 방정식을 아래와 같이 세울 수 있다.
[math(\displaystyle \begin{aligned} m\ddot{x}&=-mk \dot{x} \\ m\ddot{y}&=-mg-mk \dot{y} \end{aligned} )]
이 미분 방정식을 풂으로써 물체의 위치가 결정된다.
[math(\displaystyle \begin{aligned} x&=\frac{V}{k} ( 1-e^{-kt} ) \\ y&=-\frac{gt}{k}+\frac{kW+g}{k^{2}} ( 1-e^{-kt}) \end{aligned} )]
이 결과에서 눈여겨봐야 하는 것은 모든 축 방향의 운동이 가속도 운동이라는 것이다. 각 위치를 시간에 대해 이차미분해보라.
이 조건에서 물체가 포물선 운동하는 시간은 [math(t=T\,(T \neq 0))]일 때, [math(y=0)]이 되는 시간이다. 즉,
[math(\displaystyle \frac{gT}{k}=\frac{kW+g}{k^{2}} ( 1-e^{-kT}) )]
의 방정식을 풀면 된다. 그러나 이 방정식은 해석적인 해를 갖지 않기 때문에 수치계산이나 섭동법을 이용해야 한다.
만약, 수치계산이나 섭동법을 통해 포물선 운동 시간 [math(T)]를 구했다고 하자. 그렇다면, 수평 도달 거리는 [math(R=x(t=T) )]가 되므로
[math(\displaystyle R=\frac{V}{k}( 1-e^{-kT}) )]
으로 구할 수 있다.
아래는 [math(\theta=\pi/4)], [math(v_{0}=200\,\mathrm{m/s})]일 때 여러 [math(k)]에 대해 궤도를 시뮬레이션한 것이다.

[math(k=0)] 즉, 적색 궤도는 공기 저항을 고려하지 않았을 때이며, 공기 저항 계수가 커질수록 수평 도달 거리는 줄어든다. 다음을 참고하자. 조건은 위의 궤도를 구할 때와 같고, 수치계산을 이용하였다.

참고로, [math(k \ll 1)]일 때를 가정하여 이 과정을 섭동으로 풀 수도 있으나 계산이 매우 복잡하다. 고전역학 교재를 참고하는 편이 좋다.
5. 표면 운동으로 근사되지 않는 경우[편집]
파일:namu_포물선 운동_심화_스케일확대.svg
분석하기 앞서 지구의 자전, 공전, 마찰 등은 고려하지 않음을 일러둔다.
위의 분석에서는 그림 (가)와 같이 물체는 지구 표면과 가까워 일정한 표면 가속도 [math(\mathbf{g})]에 의한 힘을 받는 비스듬히 투사된 물체의 궤도는 포물선임을 다뤘다.
이제는 그림 (나)와 같이, 예를 들어 ICBM 처럼 지구 표면에서 충분히 멀어질 수 있는 스케일, 즉 표면 가속도에 의한 힘으로 근사되지 않는 진정한 중력 [math(\mathbf{F})]를 받는 물체의 궤도를 분석해보려고 한다. 이 경우에도 왠지 포물선 운동할 것 같다는 생각이 든다. 결론부터 말하자면 이는 틀린 생각이다.
사실 중심력 문서에서 답은 나와있다. 보통 중심력을 다룰 때는 공전을 하거나, 속박되지 않을 때 그 궤도가 원뿔 곡선이라 생각하는 경향이 짙으나 사실은 속박된 상태에서도 그 궤도는 원뿔 곡선이다. 그 이유는 어째됐던 물체에 작용하는 힘은 (외력이 없다면) 중심력인 중력 뿐이기 때문이다.
그럼 결국 후보는 원, 타원, 포물선, 쌍곡선로 그 후보가 압축된다. 이때, 한 초점은 지구의 중심과 같다.
중심력 문서로 부터 궤도 방정식은
[math(\displaystyle r=\frac{r_{0}}{1+\varepsilon \cos{\theta}} )]
이고, 궤도 이심률은
[math(\displaystyle \varepsilon=\sqrt{1+\frac{2El^{2}}{ (GM)^{2} m^{3} } } )]
이다. [math(m \ll M)]이므로 환산 질량 [math(\mu \approx m)]임을 이용했다. 그런데 위 식을 보면 [math(E)]의 부호에 따라 이심률의 크기가 결정됨을 쉽게 알 수 있다. 또한 우리는 퍼텐셜에 속박된 상태를 다루므로 [math(E<0)]이다. 따라서 가능한 [math(0 \leq \varepsilon <1)]이다. 이에 후보는 놀랍게도 포물선이 아닌 원 혹은 타원으로 압축된다.
우선 해당 궤도가 원 궤도라 가정해보자. 그럴 경우 [math(\varepsilon=0)]이다.
해당 운동에서 각운동량은 보존되므로 초기 각운동량의 크기가 곧 [math(l)]이다.
[math(\displaystyle mv_{0}R\sin{\theta}=l )]
[math(R)]은 지구의 반지름이다. 또, 에너지 또한 보존되므로 초기 에너지를 [math(E)]라 쓸 수 있다.
[math(\displaystyle -\frac{GMm}{R}+\frac{1}{2}mv_{0}^{2}=E )]
원 궤도가 되려면
[math(\displaystyle 2El^{2}=-(GM)^{2} m^{3} )]
여기에 위의 [math(E)], [math(l)]을 대입하면 [math(v_{0}^2)]에 대한 이차방정식을 얻는데,
[math(\displaystyle R^2v_{0}^4-2GMRv_{0}^{2}+G^2M^2\csc^{2}{\theta}=0 )]
이 방정식의 해의 유형을 조사하기 위해 판별식 [math(D)]를 사용하면
[math(\displaystyle \frac{D}{4}=G^2 M^2 R^2 [1-\csc^{2}{\theta}] \leq 0 )]
따라서 대부분 [math(v_{0})]에 대해서 원 궤도는 불가능하고, 가능한 경우는 딱 한 경우
[math(\displaystyle 1-\csc^{2}{\theta}=0 \quad \to \quad \theta=\frac{\pi}{2} )]
에 원 궤도가 가능하며, 이 경우 [math(v_{0}=\sqrt{GM/R})]이다. 하지만 이 경우는 물체가 비행하지 않으므로 우리의 논의 목적에 비춰볼 때 더 이상 탐구할 필요가 없다.
따라서 이 논의의 답은 타원인 것이다. 즉, 포물선 운동은 곧 이 타원 운동의 근사가 되는 것이다.
물체의 가장 높게 올라갔을 때, 지구의 중심으로부터 거리
[math(\displaystyle r_{\max}=-\frac{GMm}{E_{0}}(1+\varepsilon) )]
임을 남겨둔다. 관심있는 독자는 증명해볼 것. [math(E_{0})]는 초기 물체의 에너지이다.
6. 관련 예제[편집]
수능 등에서는 변별을 가르기 위한 고난도 문항으로 출제되고 있으며, 항상 한 정보만 알면 쉽게 풀 수 있는데도 불구하고 그것을 주지 않아 어려워지거나 여러 운동 상황과 섞는 등으로 난이도가 급상승하는 경우가 많다.
더군다나, 포물선 운동 자체가 등가속도 운동과 등속도 운동 두 항목에 대한 이해도를 효율적으로 물을 수 있으므로 출제자 입장에서는 어려운 문제로 내기 딱 좋은 소재이다.
2문제를 관련 예제로 제시하였다. 예제 1은 등가속도 운동과 등속도 운동을 분석하는 방법으로, 예제 2는 역학적 에너지 보존을 이용하여 분석하는 방법으로 푸는 문제이다.
6.1. 예제 1[편집]
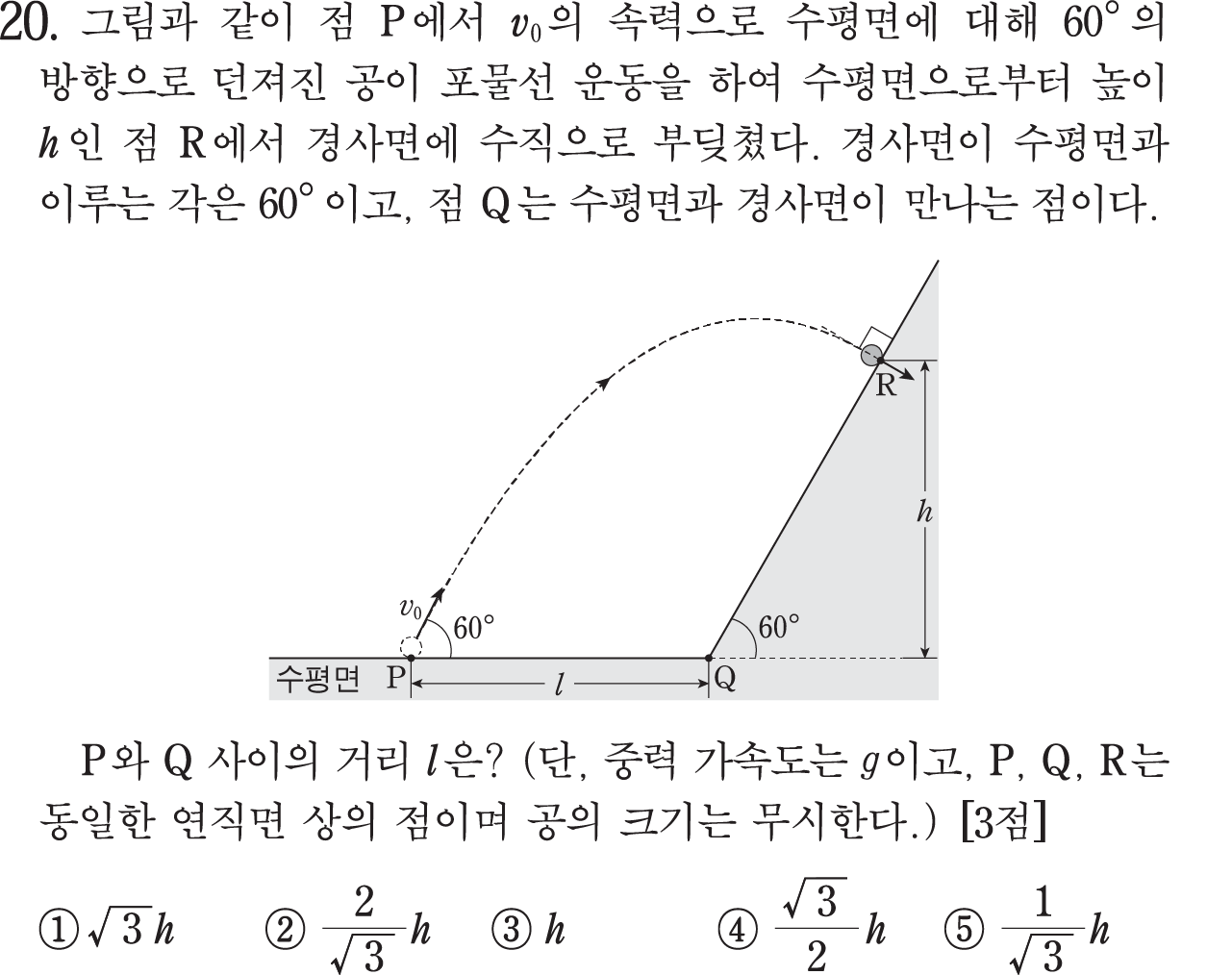
[풀이 보기] -
위 그림에서 (가)는 이 상황에 대한 모식도, (나)는 충돌 직전의 속도 성분을 분해한 것이다. (나)의 경우 포물선 운동하므로 속도의 수평 방향 성분은 [math(v_{0}\cos{(60\degree)}=v_{0}/2)]으로 이것은 경사면에 충돌하기 직전에도 똑같이 유지되고, 경사면과 수직하게 부딪혔으므로 속도 벡터는 수평면과 [math(30\degree)]를 이뤄야 함을 이용하면 간단한 삼각비 공식과 피타고라스 정리를 이용해 구할 수 있다.
[math(\mathbf{\hat{x}})], [math(\mathbf{\hat{y}})] 방향을 [math(+)]로 잡는다.
우선 [math(h)]를 구하자. 수직 방향의 운동은 중력 가속도를 가지는 등가속도 운동이고, 충돌 직전까지 [math(+h)]만큼의 변위를 가지므로
[math(\displaystyle \begin{aligned} 2(-g)h=\biggl(-\frac{\sqrt{3}}{6}v_{0}\biggr)^2-(v_{0}\sin{(60\degree)})^2 \quad \to \quad h=\frac{v_{0}^2}{3g} \end{aligned} )]
한편, 이러한 운동이 이루어진 시간 [math(T)]는 수직 방향의 운동은 중력을 받아 등가속도 운동함을 이용하여 이 시간동안 평균 가속도는 중력 가속도임을 이용하여 구한다.
[math(\displaystyle \begin{aligned} \frac{-\dfrac{\sqrt{3}}{6}v_{0}-\dfrac{\sqrt{3}}{2}v_{0}}{T}=-g \quad \to \quad T= \frac{2\sqrt{3}v_{0}}{3g}\end{aligned} )]
이 시간 동안 수평으로 이동한 거리는
[math(\displaystyle \begin{aligned} \frac{1}{2}v_{0}T=l+\frac{h}{\sqrt{3}} \quad \to \quad l=\frac{2\sqrt{3}v_{0}^{2}}{9g} \end{aligned} )]
이상에서
[math(\displaystyle \begin{aligned} l=\frac{2}{\sqrt{3}}h \end{aligned} )]

6.2. 예제 2[편집]
[풀이 보기] -
물체가 최고점에 이를 때는 처음 속도의 수평 성분만 가진다. 따라서 최고점 도달 시 물체의 속력은 [math(v_{0}\cos{(60\degree)}=v_{0}/2)]이다. 또한 최고점에 도달했을 때의 높이는 문제 조건에 따라 [math(2h)]이다. 비보존력이 작용하지 않았으므로 역학적 에너지는 보존되기 때문에
[math(\displaystyle \begin{aligned} \frac{1}{2}mv_{0}^{2}=mg(2h)+\frac{1}{2}m\left(\frac{1}{2}v_{0}\right)^{2} \quad \to \quad h=\frac{3v_{0}^2}{16g} \end{aligned} )]
이는 경사면 도달 직전에도 성립한다.
[math(\displaystyle \begin{aligned} \frac{1}{2}mv_{0}^{2}=mgh+\frac{1}{2}mv^{2} \quad \to \quad v=\frac{\sqrt{5}}{2\sqrt{2}}v_{0} \end{aligned} )]
경사면의 각도를 [math(\theta)]라 하자. 경사면 도달 직전 속도를 분해하여 다음을 얻는다.
[math(\displaystyle \begin{aligned} \cos{\theta}=\frac{\dfrac{v_{0}}{2}}{\dfrac{\sqrt{5}}{2\sqrt{2}}v_{0}}=\sqrt{\frac{2}{5}} \end{aligned} )]
역학적 에너지 보존에 따라 경사면을 내려왔을 때 또한 속력은 [math(v_{0})]이므로 수평성분은
[math(\displaystyle \begin{aligned} v_{0}\cos{\theta}=\sqrt{\frac{2}{5}}v_{0} \end{aligned} )]
7. 여담[편집]
- 중력장에서의 포물선 운동만 고려했지만, 실제론 전기장[6] 등에서도 이러한 운동이 가능하다.
- 이 포물선 궤도는 중심력장에서도 가능한데, 일정 조건만 만족시키면 소행성이 항성을 한 초점으로 하여 포물선 궤도로 운동할 수도 있다.
- 명탐정 코난: 천국으로의 카운트다운에서 미야노 시호가 머리로만 이 운동을 해석해내는 능력을 보여주었다. 물론 주 시청자가 어린이라는 점을 고려, 단순히 '어려운 문제를 풀고 있다'는 생각을 심어 해당 인물의 능력을 보여주는 장면이었겠지만 고등학교 물리학 교과목을 정상적으로 이수한 학생들은 쉬운 문제 상황임을 간파했을 것이다. 수능 3점 짜리 문제에 비하면 대단히 쉬운 문제 상황이다. 덤으로 해당 사람들은 포물선 운동을 복습하는 기회였을 것이다.
8. 관련 문서[편집]
 이 문서의 내용 중 전체 또는 일부는 2023-12-24 01:38:01에 나무위키 포물선 운동 문서에서 가져왔습니다.
이 문서의 내용 중 전체 또는 일부는 2023-12-24 01:38:01에 나무위키 포물선 운동 문서에서 가져왔습니다.