Courseplay
덤프버전 :
Courseplay 공식 홈페이지[1]
Courseplay 튜토리얼 (영어)
Courseplay는 파밍 시뮬레이터 시리즈에서 사용할 수 있는 MOD 중 하나이다. 최초 공개는 2013 이후 부터이다.
파밍 시뮬레이터 시리즈 내에서, 일꾼을 고용하여 작업을 맡기는 것이 가능하다. 그러나 이런 기본적으로 제공되는 일꾼의 인공지능은 오로지 밭 내부에서만 작용된다. Courseplay는 이름처럼 플레이어가 우선적으로 코스를 지정해 준 뒤, 그것을 드라이빙 일꾼에게 맡긴 채 지정된 코스를 그대로 이동하면서 밭 내부는 물론 외부의 작업, 그리고 인공지능의 한계상 고용할 수 없는 작업까지 동시에 수행하도록 해주는 MOD이다.
기본 값 세팅 기준으로 왼쪽 CTRL + Delete 키를 눌러서 Courseplay HUD를 활성화할 수 있다. 이러한 상태에서 코스를 지정 시작하거나 다양한 Courseplay 작업을 행할 수 있다.
Courseplay HUD를 활성화하면 기본적으로 Courseplay 컨트롤 창이 나타날 것이다. 처음 Courseplay를 사용한다면, 당신은 지금 저장된 코스가 없기에 그 어떠한 경우에도 Courseplay를 통한 자동 코스 주행을 맡길 수 없을 것이다. 따라서 새로운 코스를 만들기 위하여
하지만 코스가 '생성'되었지 '저장'은 되어있지 않다. 코스 리코딩이 성공적으로 이루어졌다면 당분간 그 코스는 '임시 코스'로 지정되고, 지우기 전 까지는 영원히 남는다. 당신이 그 코스를 통해서 시범운행을 하였고 크나큰 문제점이 없다고 판단된다면, 그 코스를 이제 후에 사용하기 위하여 디스크 모양의 저장 버튼을 눌러서 원하는 이름으로 코스를 저장하면 된다. 한번 저장된 코스는 계속해서 불러들여서 사용할 수 있다. 코스 리코딩을 간단하게 하기 위해 왼쪽 CLTR + 키패드 7 키를 눌러서 즉시 코스 리코딩, 다시 눌러서 즉시 리코딩 중단이 가능하다.
새롭게 생성된 코스가 있다면 이제 즉시
Courseplay는 단지 지정된 코스대로만 움직이고 멈추는 기능만 갖춘 것이 아니다. 그 코스를 토대로 여러가지 작업을 수행하도록 하는 것이 가능하다. 간단하게 파종, 비료 발포, 적재 트레일러를 견인하여 수확기로부터 작물 내려받기, 혹은 오버로딩이 가능하다.
Grain transport 모드는 드라이버가 처음 시작 지점을 기준으로 작물을 내려받고, 그것을 원하는 하역 지점으로 운반해주기 위한 모드이다. Grain transport 모드 주행을 하기 위해서는 드라이버가 상품을 적어도 하나 이상 적재할 수 있는 트레일러를 견인한 상태여야 한다. 장비 자체가 적재 가능 공간을 보유한 경우에도 허용된다.
트랙터는 적재 트레일러가 채워질 때 까지 첫 번째 웨이 포인트에서 대기한다. 첫 번째 웨이 포인트의 위치는 기본적으로 작물을 내려 받을 수 있는 곡물 사일로나 벨트는 물론 상품을 운반하도록 계획되어 있는 지역에서 설정한다. 적재 트레일러 내부를 채우는 수준은 직접 설정된 비율 (
마지막 웨이 포인트는 첫 번째 웨이 포인트로부터 대략 5 m ~ 10 m 가량 떨어져 있어야 하며, 두 웨이 포인트 사이는 서로 일직선으로 이루어져 있어야 한다.

Combi 모드는 작물을 수확하고 있는 특정한 수확기를 대상으로 하여 수확기로 다가가 작물을 스스로 내려받고, 농가를 포함한 하역 지점에 작물을 운반하도록 해주는 모드이다. Grain transport 모드와 유사한 구조이며 단지 스스로 직접 수확기를 찾아가서 작물을 내려받는다는 차이가 있다.
트랙터는 지정된 수확기가 백분율로 지정된 채우기 수준 (
트랙터에 수확기를 할당시키는 방법은 총 두 가지가 있다:

Overloader 모드는 작물을 수확하고 있는 특정한 수확기를 대상으로 하여 수확기로 다가가 작물을 스스로 내려받고, 그것을 다른 트레일러로 옮겨주도록 해주는 모드이다. Combi 모드와 유사하게 수확기를 할당시킬 수 있으며 단지 작물을 내리는 곳이 일반 하역 지점이 아닌 트레일러라는 것이 차이이다.
코스의 시작 지점은 대기하고 있는 트레일러 근처에서 시작되어야 한다. 설정할 코스는 트레일러 근처를 지나쳐야 하며 특히 트레일러 위에서 파이프를 펼쳐서 작물을 내릴 수 있는 지점 (= 오버로딩 포인트)에 하나의 대기 지점을 설정하여야 한다. 후에 코스를 주행하면 드라이버가 이 대기 지점에 다다를 때 파이프를 펼치고 작물 내리기를 시도한다. 동시에 드라이버가 오버로딩 지점에 도착하였을 때
대기 지점을 설정한 후 코스는 조금 더 멀리 (즉 트레일러로부터 멀리) 나아가는 코스를 설정해야 하며 가장 적절한 코스로는 마지막 웨이 포인트는 첫 번째 웨이 포인트에 어느정도 가까워야 한다.

Fertilize and seeding 모드는 드라이버가 밭 내의 파종과 비료 발포 작업을 효율적으로 진행할 수 있도록 해주는 모드이다.
비료 발포 및 파종 작업을 할 때 두 개의 코스가 할당되어야 한다. 이는 필수적이지 않으나, 비료나 씨앗이 부족해질 경우 스스로 충전하도록 하여야 하므로 대형 밭에서는 설정하는 것이 좋다.
첫 번째 코스는 밭 내부 작업을 위한 코스이다. 밭 내부 작업 코스는 두 가지의 방법을 통해 설정할 수 있다:
두 번째 코스는 도구가 비었을 때 그것을 자동으로 채우기 위한 과정이다. 기본적으로 두 번째 대기 지점 (밭 작업의 끝 지점)에서 첫 번째 웨이 포인트가 시작되어야 한다. 이 후 비료 / 액체 비료 / 씨앗을 충전시켜주는 트리거를 직접 방문하고 다시 첫 번째 대기 지점 (밭 작업의 시작 지점)에서 마지막 웨이 포인트가 끝나야 한다. 드라이버가 자동 충전 트리거에 도달하면 즉시 도구를 채울 것이다. 하지만 드라이버는 수동적인 방법을 이용하지 못 하며 (예로 파종기를 직접 열어서 벨트나 셔블로 충전시키는 경우) 이 경우에는 충전 지역의 근처에 대기 지점을 하나 설정한 뒤 도구를 직접 채워주어야 한다.
충전 트리거를 방문하거나 충전 대기 지점에 도달하면
도구가 비게 되면 즉시 이동에 적합하도록 도구를 접고, 드라이버는 충전 코스를 따른다. 충전을 다 한 뒤 다시 밭으로 돌아가면 가장 최근에 처리한 지점으로 돌아가서 도구를 다시 펼치고, 작업을 지속한다.

Transfer 모드는 드라이버가 A 지점에서 B 지점까지 이동하도록 해주는 모드이다.
Transfer 모드는 A 지점에서 B 지점으로 이동시키는 아주 단순한 구조의 모드이다. 단지 시작과 끝이 정해져 있는 코스를 사용한다. 드라이버는 Transfer 모드로 주행하는 동안 자신에게 부착된 트레일러를 포함한 장비를 상관하지 않은 채 목적 없이 그 코스만을 주행한다. 마지막 웨이 포인트에 도달하면 다시 첫 웨이 포인트로 돌아가 코스를 반복 주행한다. 코스의 무한 반복을 중단하려면
Field work 모드는 드라이버가 지정된 코스를 기반으로 컬티베이팅, 쟁기질 뿐만이 아니라 윈드로, 건초 작업, 베일링, 로더 왜건 등 통상적으로 일꾼을 고용할 수 없는 장비에 대하여 밭 내에서 효율적으로 작업하도록 하는 모드이다.
Fertilize and seeding 모드와 유사하게 각 밭의 시작과 끝 지점에는 대기 지점이 필요하다. 다만 여기서는 도구를 재충전하는 대신 채워지는 도구를 비우거나 내릴 필요가 있다 (특히 수확기). 언로딩 코스를 주행 시에는 해당 상품을 내릴 수 있는 하역 지점을 거쳐가야 한다. 우선 당신은 밭 작업 코스를 다음 두 가지의 방법을 이용해서 생성할 수가 있다.
도구가 꽉 차게 되면 드라이버는 즉시 작업을 중단하고, 언로딩 코스를 따른다. 언로딩 코스를 통해 도구를 비우고 돌아오면 드라이버는 마지막에 작업했던 그 지점으로 다시 돌아가서 작업을 지속한다. 드라이버는 이러한 과정을 밭 작업을 전부 마칠 때 까지 지속한다. 작업이 끝나면 비로소 도구 작동을 끄고 장비를 다시 운반에 적합한 휴무 형태로 전환한다.

Combine self unloading 모드는 평상시 수확기가 밭 내 작물 수확 작업을 하여 작물이 어느정도 채워졌을 때, 드라이버가 지정된 코스를 기반으로 작물을 적재 트레일러를 포함한 하역 지점에 작물을 언로딩하는 모드이다.
Overloader 모드와 매우 유사한 형태이다. 코스를 설정할 때, 수확기가 작물을 내리게 될 지점에 대기 지점을 지정하여야 한다. 적절하게 코스를 설정했다면 드라이버는 지정된 대기 지점에서 자동으로 파이프를 펼치고, 내부에 있는 작물을 가능하다면 비워서 언로딩하며, 모두 비워지면 다시 작업을 재개한다.
수확기 조종자는 밭 내부 작업을 오로지 일반적인 일꾼 (AutoCombine 포함)에게 맡겨야만 하며 특별한 밭 내부 작업 코스를 할당할 필요가 없다. 이 모드를 사용하고 있고 적절하게 코스를 설정했다면 수확기 조종자는

Liquid manure transporter 모드는 슬러리, 다이제스테이트같은 액체 거름을 미리 운반시켜서 슬러리 분무 탱크가 액체 거름을 빠르고 편리하게 거름을 받을 수 하는 모드이다.
슬러리와 다이제스테이트는 천연 거름이기에 그 소모량이 매우 빠른 편이다. 때문에 주기적으로 거름 충전 탱크가 항시 주변에 대기할 필요가 있다. 이 모드는 액체 거름을 플레이어의 간섭 없이도 자체적으로 고정된 액체 거름 탱크로부터 거름을 내려 받고, 다시 작업하는 밭 근처로 돌아와 액체 거름을 옮겨주는 모드이다.
당신이 Liquid manure transporter 모드에 의한 코스를 설정할 때 다음 두 가지만을 명심하여야 한다:

Fill and empty shovel 모드는 고체 상품을 채운 뒤 그것을 다시 비우는 작업을 진행하기 위한 모드이다. 대개 사일로에 있는 사일리지를 판매하기 위함이나 고체 거름을 운반하기 위해 사용된다.
기본적으로 상품을 버킷으로 담고, 뒤로 이동한 뒤, 적재 트레일러를 포함한 내리기 지역으로 이동하고, 다시 셔블을 내려 상품을 내리고, 돌아오기 이렇게 많고 복잡한 과정이 존재하기 때문에 코스 설정에 신경을 많이 써야 한다. 코스 설정 시에는 다음의 과정을 알아두어야 한다:
코스를 모두 설정했다면 이제 shovel positions을 설정한다.
코스 주행을 시작하면 드라이버는 첫 번째 대기 지점에서 셔블을 적재 위치로 설정한다. 이 후 셔블이 가득 채워질 때 까지 계속해서 적재 위치 상태를 유지한 채 나아가며, 가득 채워지면 정지한 뒤 운송 위치로 설정한다. 그 이후 영역으로부터 천천히 벗어날 것이다.
드라이버가 세 번째 대기 지점을 만나기 직전의 네 번째 웨이 포인트부터 프리 언로딩 위치를 설정하여 언로딩을 할 벙커나 트레일러를 찾게 된다. 아무것도 발견하지 않았다면 드라이버는 그 자리에서 멈춰서 발견할 때 까지 셔블을 내리지 않을 것이다. 만약 내릴 수 있는 적재 공간을 발견했다면 즉시 셔블을 언로딩 위치로 설정하고 셔블에 담은 상품을 내린다.
만약 트레일러를 채우려 한다면 적재 트레일러는 정확하게 세 번째 대기 지점 바로 앞에 있어야 할 필요는 없으며 약간 떨어져 있어도 된다. 하지만 셔블 로더 드라이버가 안전하고 상품을 흘리지 않고 운반할 수 있도록 세 번째 대기 지점 앞에 있어야 한다. 셔블 로더 드라이버는 상품을 전부 내리면 다시 프리 언로딩 위치로 돌아가고 동시에 다시 트레일러로부터 멀어지기 시작하며 이 후 처음 시작 지점으로 돌아가 마지막 사일로의 끝에 다다를 때 까지 코스 주행을 지속한다.
 이 문서의 내용 중 전체 또는 일부는 2023-10-22 21:17:56에 나무위키 Courseplay 문서에서 가져왔습니다.
이 문서의 내용 중 전체 또는 일부는 2023-10-22 21:17:56에 나무위키 Courseplay 문서에서 가져왔습니다.
1. 개요
2. Courseplay 사용하기
2.1. 코스 리코딩과 주행
2.2. 드라이빙 모드
2.2.1. Grain transport (작물 운반)
2.2.2. Combi (콤바인 작물 운반)
2.2.3. Overloader (오버로더)
2.2.4. Fertilize and seeding (비료 및 파종)
2.2.5. Transfer (이동)
2.2.6. Field work (밭 작업)
2.2.7. Combine self unloading (콤바인 셀프 언로딩)
2.2.8. Liquid manure transporter (액체 거름 운반)
2.2.9. Fill and empty shovel (셔블 채우고 비우기)
2.2.10. Leveling and compacting (레벨링과 압축)
1. 개요[편집]
Courseplay 튜토리얼 (영어)
Courseplay는 파밍 시뮬레이터 시리즈에서 사용할 수 있는 MOD 중 하나이다. 최초 공개는 2013 이후 부터이다.
파밍 시뮬레이터 시리즈 내에서, 일꾼을 고용하여 작업을 맡기는 것이 가능하다. 그러나 이런 기본적으로 제공되는 일꾼의 인공지능은 오로지 밭 내부에서만 작용된다. Courseplay는 이름처럼 플레이어가 우선적으로 코스를 지정해 준 뒤, 그것을 드라이빙 일꾼에게 맡긴 채 지정된 코스를 그대로 이동하면서 밭 내부는 물론 외부의 작업, 그리고 인공지능의 한계상 고용할 수 없는 작업까지 동시에 수행하도록 해주는 MOD이다.
기본 값 세팅 기준으로 왼쪽 CTRL + Delete 키를 눌러서 Courseplay HUD를 활성화할 수 있다. 이러한 상태에서 코스를 지정 시작하거나 다양한 Courseplay 작업을 행할 수 있다.
2. Courseplay 사용하기[편집]
2.1. 코스 리코딩과 주행[편집]
Courseplay HUD를 활성화하면 기본적으로 Courseplay 컨트롤 창이 나타날 것이다. 처음 Courseplay를 사용한다면, 당신은 지금 저장된 코스가 없기에 그 어떠한 경우에도 Courseplay를 통한 자동 코스 주행을 맡길 수 없을 것이다. 따라서 새로운 코스를 만들기 위하여
Start course recordingStart course recording하지만 코스가 '생성'되었지 '저장'은 되어있지 않다. 코스 리코딩이 성공적으로 이루어졌다면 당분간 그 코스는 '임시 코스'로 지정되고, 지우기 전 까지는 영원히 남는다. 당신이 그 코스를 통해서 시범운행을 하였고 크나큰 문제점이 없다고 판단된다면, 그 코스를 이제 후에 사용하기 위하여 디스크 모양의 저장 버튼을 눌러서 원하는 이름으로 코스를 저장하면 된다. 한번 저장된 코스는 계속해서 불러들여서 사용할 수 있다. 코스 리코딩을 간단하게 하기 위해 왼쪽 CLTR + 키패드 7 키를 눌러서 즉시 코스 리코딩, 다시 눌러서 즉시 리코딩 중단이 가능하다.
새롭게 생성된 코스가 있다면 이제 즉시
Drive course2.2. 드라이빙 모드[편집]
Courseplay는 단지 지정된 코스대로만 움직이고 멈추는 기능만 갖춘 것이 아니다. 그 코스를 토대로 여러가지 작업을 수행하도록 하는 것이 가능하다. 간단하게 파종, 비료 발포, 적재 트레일러를 견인하여 수확기로부터 작물 내려받기, 혹은 오버로딩이 가능하다.
2.2.1. Grain transport (작물 운반)[편집]

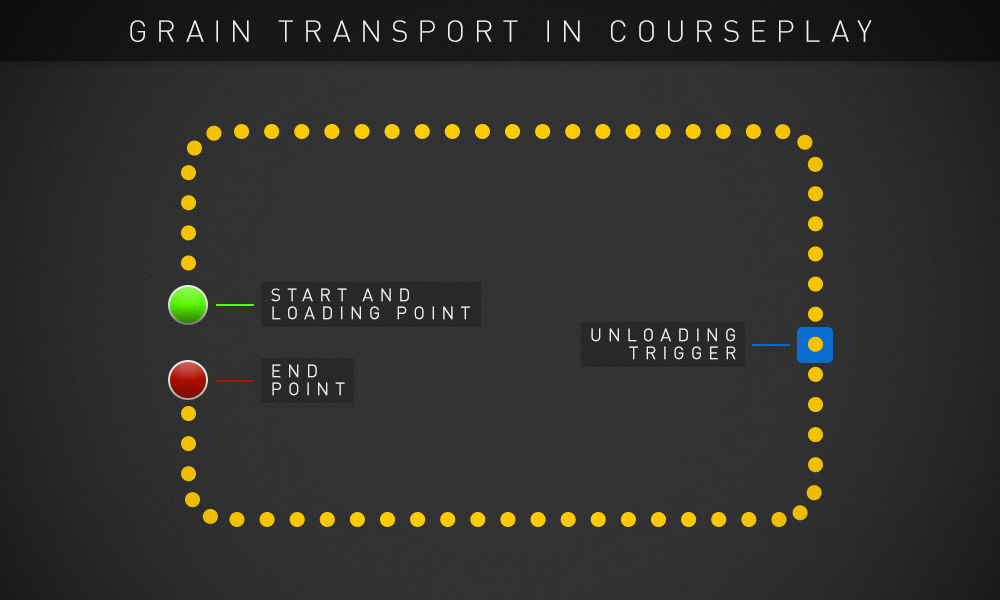
Grain transport 모드는 드라이버가 처음 시작 지점을 기준으로 작물을 내려받고, 그것을 원하는 하역 지점으로 운반해주기 위한 모드이다. Grain transport 모드 주행을 하기 위해서는 드라이버가 상품을 적어도 하나 이상 적재할 수 있는 트레일러를 견인한 상태여야 한다. 장비 자체가 적재 가능 공간을 보유한 경우에도 허용된다.
트랙터는 적재 트레일러가 채워질 때 까지 첫 번째 웨이 포인트에서 대기한다. 첫 번째 웨이 포인트의 위치는 기본적으로 작물을 내려 받을 수 있는 곡물 사일로나 벨트는 물론 상품을 운반하도록 계획되어 있는 지역에서 설정한다. 적재 트레일러 내부를 채우는 수준은 직접 설정된 비율 (
Drive on at %마지막 웨이 포인트는 첫 번째 웨이 포인트로부터 대략 5 m ~ 10 m 가량 떨어져 있어야 하며, 두 웨이 포인트 사이는 서로 일직선으로 이루어져 있어야 한다.
2.2.2. Combi (콤바인 작물 운반)[편집]
Combi 모드는 작물을 수확하고 있는 특정한 수확기를 대상으로 하여 수확기로 다가가 작물을 스스로 내려받고, 농가를 포함한 하역 지점에 작물을 운반하도록 해주는 모드이다. Grain transport 모드와 유사한 구조이며 단지 스스로 직접 수확기를 찾아가서 작물을 내려받는다는 차이가 있다.
트랙터는 지정된 수확기가 백분율로 지정된 채우기 수준 (
Start at %Drive on at %트랙터에 수확기를 할당시키는 방법은 총 두 가지가 있다:
- 코스의 마지막 웨이 포인트가 수확기가 작업 처리하고 있는 밭 내에 있을 경우. 이 경우에는 밭이 너무 크거나 멀리 있지 않다면 드라이버가 스스로 수확기를 탐색한다. 또한 거리와 여러 수확기의 채우기 수준을 고려하여 자신에게 알맞는 수확기를 자신에게 스스로 할당시켜 주행한다.
- 플레이어가 직접 스스로 해당 드라이버에게 단 하나의 수확기를 할당시킬 수 있다 (HUD: manage combines 참조). 드라이버는 오로지 자신에게 할당된 수확기만을 주시하며, 다른 수확기는 전혀 고려하지 않는다. 따라서 직접 수확기를 할당해 주었다면 현재 드라이버와 수확기가 서로 동일한 밭에 있는지, 그리고 서로 가까운지에 대해서는 전혀 중요하지 않다. 멀리 있더라도 도달할 수가 있다면 어떻게서든 드라이버는 할당된 단 하나의 수확기만을 찾아가 작물을 내려받을 것이다.
2.2.3. Overloader (오버로더)[편집]

Overloader 모드는 작물을 수확하고 있는 특정한 수확기를 대상으로 하여 수확기로 다가가 작물을 스스로 내려받고, 그것을 다른 트레일러로 옮겨주도록 해주는 모드이다. Combi 모드와 유사하게 수확기를 할당시킬 수 있으며 단지 작물을 내리는 곳이 일반 하역 지점이 아닌 트레일러라는 것이 차이이다.
코스의 시작 지점은 대기하고 있는 트레일러 근처에서 시작되어야 한다. 설정할 코스는 트레일러 근처를 지나쳐야 하며 특히 트레일러 위에서 파이프를 펼쳐서 작물을 내릴 수 있는 지점 (= 오버로딩 포인트)에 하나의 대기 지점을 설정하여야 한다. 후에 코스를 주행하면 드라이버가 이 대기 지점에 다다를 때 파이프를 펼치고 작물 내리기를 시도한다. 동시에 드라이버가 오버로딩 지점에 도착하였을 때
*장비 이름* has reached overload point.대기 지점을 설정한 후 코스는 조금 더 멀리 (즉 트레일러로부터 멀리) 나아가는 코스를 설정해야 하며 가장 적절한 코스로는 마지막 웨이 포인트는 첫 번째 웨이 포인트에 어느정도 가까워야 한다.
2.2.4. Fertilize and seeding (비료 및 파종)[편집]

Fertilize and seeding 모드는 드라이버가 밭 내의 파종과 비료 발포 작업을 효율적으로 진행할 수 있도록 해주는 모드이다.
비료 발포 및 파종 작업을 할 때 두 개의 코스가 할당되어야 한다. 이는 필수적이지 않으나, 비료나 씨앗이 부족해질 경우 스스로 충전하도록 하여야 하므로 대형 밭에서는 설정하는 것이 좋다.
첫 번째 코스는 밭 내부 작업을 위한 코스이다. 밭 내부 작업 코스는 두 가지의 방법을 통해 설정할 수 있다:
- 당신이 직접 코스를 설정한다. 우선 두 개의 대기 지점을 설정하여야만 한다. 첫 번째 대기 지점은 밭 작업이 처음 시작되는 위치에서, 마지막 대기 지점은 밭 작업이 끝나는 지점. 대기 지점 설정은 이 모드의 올바른 기능을 할 수 있도록 하기 위하여 절대적으로 필요하다.
- 당신이 밭 자동 탐색을 활성화했다면, 코스를 자동으로 생성시킬 수가 있다 (Generate course 문단 참조). 이렇게 직접 생성된 코스는 자동으로 대기 지점이 설정된다.
두 번째 코스는 도구가 비었을 때 그것을 자동으로 채우기 위한 과정이다. 기본적으로 두 번째 대기 지점 (밭 작업의 끝 지점)에서 첫 번째 웨이 포인트가 시작되어야 한다. 이 후 비료 / 액체 비료 / 씨앗을 충전시켜주는 트리거를 직접 방문하고 다시 첫 번째 대기 지점 (밭 작업의 시작 지점)에서 마지막 웨이 포인트가 끝나야 한다. 드라이버가 자동 충전 트리거에 도달하면 즉시 도구를 채울 것이다. 하지만 드라이버는 수동적인 방법을 이용하지 못 하며 (예로 파종기를 직접 열어서 벨트나 셔블로 충전시키는 경우) 이 경우에는 충전 지역의 근처에 대기 지점을 하나 설정한 뒤 도구를 직접 채워주어야 한다.
충전 트리거를 방문하거나 충전 대기 지점에 도달하면
Refill until percentage도구가 비게 되면 즉시 이동에 적합하도록 도구를 접고, 드라이버는 충전 코스를 따른다. 충전을 다 한 뒤 다시 밭으로 돌아가면 가장 최근에 처리한 지점으로 돌아가서 도구를 다시 펼치고, 작업을 지속한다.
2.2.5. Transfer (이동)[편집]
Transfer 모드는 드라이버가 A 지점에서 B 지점까지 이동하도록 해주는 모드이다.
Transfer 모드는 A 지점에서 B 지점으로 이동시키는 아주 단순한 구조의 모드이다. 단지 시작과 끝이 정해져 있는 코스를 사용한다. 드라이버는 Transfer 모드로 주행하는 동안 자신에게 부착된 트레일러를 포함한 장비를 상관하지 않은 채 목적 없이 그 코스만을 주행한다. 마지막 웨이 포인트에 도달하면 다시 첫 웨이 포인트로 돌아가 코스를 반복 주행한다. 코스의 무한 반복을 중단하려면
Stop at last point or at next trigger2.2.6. Field work (밭 작업)[편집]
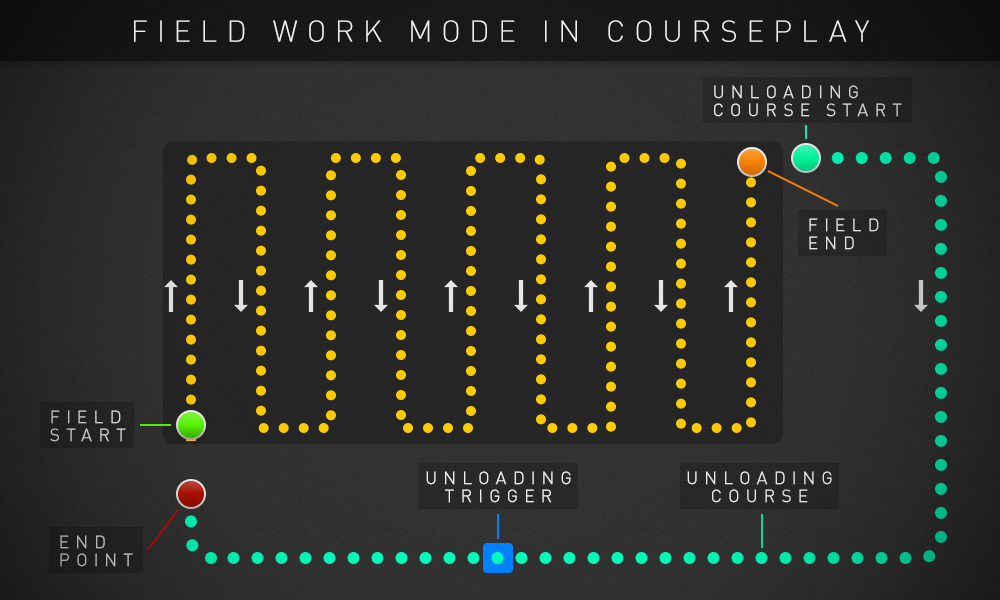
Field work 모드는 드라이버가 지정된 코스를 기반으로 컬티베이팅, 쟁기질 뿐만이 아니라 윈드로, 건초 작업, 베일링, 로더 왜건 등 통상적으로 일꾼을 고용할 수 없는 장비에 대하여 밭 내에서 효율적으로 작업하도록 하는 모드이다.
Fertilize and seeding 모드와 유사하게 각 밭의 시작과 끝 지점에는 대기 지점이 필요하다. 다만 여기서는 도구를 재충전하는 대신 채워지는 도구를 비우거나 내릴 필요가 있다 (특히 수확기). 언로딩 코스를 주행 시에는 해당 상품을 내릴 수 있는 하역 지점을 거쳐가야 한다. 우선 당신은 밭 작업 코스를 다음 두 가지의 방법을 이용해서 생성할 수가 있다.
- 당신이 직접 스스로 원하는 구역 내에서 코스를 설정, 기록한다. 우선적으로 두 가지의 웨이팅 포인트가 필요하다. 하나는 밭 작업이 시작되는 지점, 그리고 다른 하나는 밭 작업이 끝나는 지점. 이를 설정하지 않고도 언제든지 작업이 가능하지만, 재충전 기능까지 올바르게 작동하려면 이것이 절대적으로 필요하다.
- Courseplay는 자체적으로 지정되어 있는 밭 내부에 한하여 자유로운 형태의 밭 작업 코스를 생성할 수 있다. Generate course HUD를 통해서 장비가 처리하는 작업 넓이, 시작하는 지점과 방향 등을 설정하여 빠르게 작업 코스를 생성할 수 있다. 이것을 이용하면 자동으로 웨이팅 포인트 두 개가 설정된다.
도구가 꽉 차게 되면 드라이버는 즉시 작업을 중단하고, 언로딩 코스를 따른다. 언로딩 코스를 통해 도구를 비우고 돌아오면 드라이버는 마지막에 작업했던 그 지점으로 다시 돌아가서 작업을 지속한다. 드라이버는 이러한 과정을 밭 작업을 전부 마칠 때 까지 지속한다. 작업이 끝나면 비로소 도구 작동을 끄고 장비를 다시 운반에 적합한 휴무 형태로 전환한다.
2.2.7. Combine self unloading (콤바인 셀프 언로딩)[편집]
Combine self unloading 모드는 평상시 수확기가 밭 내 작물 수확 작업을 하여 작물이 어느정도 채워졌을 때, 드라이버가 지정된 코스를 기반으로 작물을 적재 트레일러를 포함한 하역 지점에 작물을 언로딩하는 모드이다.
Overloader 모드와 매우 유사한 형태이다. 코스를 설정할 때, 수확기가 작물을 내리게 될 지점에 대기 지점을 지정하여야 한다. 적절하게 코스를 설정했다면 드라이버는 지정된 대기 지점에서 자동으로 파이프를 펼치고, 내부에 있는 작물을 가능하다면 비워서 언로딩하며, 모두 비워지면 다시 작업을 재개한다.
수확기 조종자는 밭 내부 작업을 오로지 일반적인 일꾼 (AutoCombine 포함)에게 맡겨야만 하며 특별한 밭 내부 작업 코스를 할당할 필요가 없다. 이 모드를 사용하고 있고 적절하게 코스를 설정했다면 수확기 조종자는
Start at %2.2.8. Liquid manure transporter (액체 거름 운반)[편집]

Liquid manure transporter 모드는 슬러리, 다이제스테이트같은 액체 거름을 미리 운반시켜서 슬러리 분무 탱크가 액체 거름을 빠르고 편리하게 거름을 받을 수 하는 모드이다.
슬러리와 다이제스테이트는 천연 거름이기에 그 소모량이 매우 빠른 편이다. 때문에 주기적으로 거름 충전 탱크가 항시 주변에 대기할 필요가 있다. 이 모드는 액체 거름을 플레이어의 간섭 없이도 자체적으로 고정된 액체 거름 탱크로부터 거름을 내려 받고, 다시 작업하는 밭 근처로 돌아와 액체 거름을 옮겨주는 모드이다.
당신이 Liquid manure transporter 모드에 의한 코스를 설정할 때 다음 두 가지만을 명심하여야 한다:
- 설정된 코스는 액체 거름을 저장하고 있으며, 그것을 다시 자동으로 충전시켜줄 수 있는 지점을 통과하여야 한다. 종류가 슬러리인지 다이제스테이트인지는 중요하지 않다.
- 액체 거름의 재공급을 위한 원하는 위치에 하나의 대기 지점을 설정하여야 한다. 이 대기 지점에 드라이버가 멈춰서 액체 거름을 운반시킬 것이다.
2.2.9. Fill and empty shovel (셔블 채우고 비우기)[편집]

Fill and empty shovel 모드는 고체 상품을 채운 뒤 그것을 다시 비우는 작업을 진행하기 위한 모드이다. 대개 사일로에 있는 사일리지를 판매하기 위함이나 고체 거름을 운반하기 위해 사용된다.
기본적으로 상품을 버킷으로 담고, 뒤로 이동한 뒤, 적재 트레일러를 포함한 내리기 지역으로 이동하고, 다시 셔블을 내려 상품을 내리고, 돌아오기 이렇게 많고 복잡한 과정이 존재하기 때문에 코스 설정에 신경을 많이 써야 한다. 코스 설정 시에는 다음의 과정을 알아두어야 한다:
- 사일로 바로 앞에서 시작하여 앞으로 끝까지 나아간다.
- 셔블을 내려서 본격적으로 상품을 받기 시작하는 지점에 대기 지점 첫 번째를 설정한다. 드라이버가 첫 번째 대기 지점을 거치면 즉시 셔블을 내려서 작물을 받게 된다.
- 사일로의 끝을 맞이하는 부분에서 두 번째 대기 지점을 설정한다. 이 대기 지점은 '여기까지가 채우기 영역의 끝'임을 알려주는 것이다.
- 이제부터 후진 주행을 켠 뒤 천천히 사일로 내에서 빠져나온다. 느려도 괜찮으니 되도록 천천히, 똑바로 주행하여야 후에 드라이버가 주행을 엉망으로 하지 않게 된다.
- 후진 주행을 종료하고, 원하는 상품을 내려받을 적재 트레일러를 포함한 상품을 내릴 지점으로 운행한다. 이 때 마지막 4~5개의 웨이 포인트는 적어도 직선 상으로 이루어져야만 한다.
- 셔블을 아래로 내리는 (상품을 내리는) 위치에 세 번째 대기 지점을 설정한다.
- 다시 후진 주행을 켠 뒤 최대한 똑바로, 그리고 하역 지점에서 멀리 떨어지도록 주행한다.
- 다시 후진 주행을 종료하고 코스의 시작 지점으로 돌아간다. 시작 지점과 끝 지점은 일직선으로 놓는 것이 좋다.
코스를 모두 설정했다면 이제 shovel positions을 설정한다.
코스 주행을 시작하면 드라이버는 첫 번째 대기 지점에서 셔블을 적재 위치로 설정한다. 이 후 셔블이 가득 채워질 때 까지 계속해서 적재 위치 상태를 유지한 채 나아가며, 가득 채워지면 정지한 뒤 운송 위치로 설정한다. 그 이후 영역으로부터 천천히 벗어날 것이다.
드라이버가 세 번째 대기 지점을 만나기 직전의 네 번째 웨이 포인트부터 프리 언로딩 위치를 설정하여 언로딩을 할 벙커나 트레일러를 찾게 된다. 아무것도 발견하지 않았다면 드라이버는 그 자리에서 멈춰서 발견할 때 까지 셔블을 내리지 않을 것이다. 만약 내릴 수 있는 적재 공간을 발견했다면 즉시 셔블을 언로딩 위치로 설정하고 셔블에 담은 상품을 내린다.
만약 트레일러를 채우려 한다면 적재 트레일러는 정확하게 세 번째 대기 지점 바로 앞에 있어야 할 필요는 없으며 약간 떨어져 있어도 된다. 하지만 셔블 로더 드라이버가 안전하고 상품을 흘리지 않고 운반할 수 있도록 세 번째 대기 지점 앞에 있어야 한다. 셔블 로더 드라이버는 상품을 전부 내리면 다시 프리 언로딩 위치로 돌아가고 동시에 다시 트레일러로부터 멀어지기 시작하며 이 후 처음 시작 지점으로 돌아가 마지막 사일로의 끝에 다다를 때 까지 코스 주행을 지속한다.
2.2.10. Leveling and compacting (레벨링과 압축)[편집]
 이 문서의 내용 중 전체 또는 일부는 2023-10-22 21:17:56에 나무위키 Courseplay 문서에서 가져왔습니다.
이 문서의 내용 중 전체 또는 일부는 2023-10-22 21:17:56에 나무위키 Courseplay 문서에서 가져왔습니다.[1] 제작자가 직접 홈페이지에 올린 공인 FS 17 버전의 Courseplay 내려받기 링크는 현재 없다. 대신 제작자용 Courseplay FS 17 버전 인식 버전을 내려받을 수 있다.[2] 강제 상품 내리기를 사용하지 않는 하역 지점.