조화 진동자
덤프버전 :
분류
1. 개요[편집]
harmonic oscillator · 調和 振動子
평형점을 기준으로 물체의 변위에 비례한 복원력이 작용하게 되어 일정한 주기 운동을 하는 계를 말한다. 용수철 스프링 진동자가 대표적인 예이며, RLC 회로 등 조화 진동자와 동일한 양상을 보이는 고전역학을 벗어난 계도 존재한다.
2. 표현법 및 참고사항[편집]
이 문서 및 하위문서에서는 시간에 대한 물리량의 미분을 나타낼 때
[math( \displaystyle \begin{aligned} \dot{A} &\equiv \frac{\mathrm{d}A}{\mathrm{d}t} \\ \ddot{A} &\equiv \frac{\mathrm{d}^{2}A}{\mathrm{d}t^{2}} \end{aligned} )][1]
로 나타내져 있다. 여기서 [math(A )]는 물리량, [math(t )]는 시간이다.
또한, 특별한 말이 없는 이상 모든 마찰과 물체의 크기, 실이나 용수철의 질량은 무시할 수 있다고 가정한다.
3. 종류[편집]
3.1. 단순 조화 진동[편집]

위 그림과 같이 평형점[2] [math(\text{O} )]로부터 변위 [math(+A )]만큼 늘이고[3], 물체를 놓았을 때 물체의 운동이 어떻게 기술되는지 논의해보자.
후크 법칙에 따라 용수철이 평형점을 기준으로 [math(x )]만큼의 변위로 변화되었을 때의 탄성력은
이다. 참고로 마이너스는 운동 방향과 반대 방향의 힘을 나타내며, 복원력이다. 따라서 운동 방정식은
[math( \displaystyle m\ddot{x}=-kx\,\rightarrow \, \ddot{x}=-\frac{k}{m}x )]
이다. 여기서 [math(k/m \equiv \omega^{2} )]으로 각진동수의 제곱으로 정의한다. 이와 같이 어떤 계의 운동 방정식이
[math( \displaystyle \ddot{x} + {\omega}^{2} x = 0 )]
로 기술될 때, 이 계를 단순 조화 진동자(Simple Harmonic Oscillator, SHO)라고 한다. 이러한 미분 방정식은 쉽게 풀리며, 그 해는
[math( \displaystyle x(t)=C_{1}\sin(\omega t)+C_{2}\cos(\omega t) )]
이다. 이때, 초기 변위는 [math(x(0)=A )]이고, 물체를 놓은 시점이므로 물체의 초기 속도는 [math(\dot{x}(0)=0 )]을 만족해야 한다. 따라서 이 조건에 의해 sine 항은 해가 될 수 없고, [math(\dot{x}(0)=0 )], [math(C_{2}=A )]를 얻는다. 따라서 용수철의 운동을 기술하는 변위 함수는
[math( \displaystyle x(t)=A\cos(\omega t) )]
로, [math(-A \leq x \leq A )] 사이를 진동하는 것을 알 수 있다.
그런데 위의 상황은 극히 특수한 상황이며, 실제론 관측하는 초기 시점을 뭘로 잡느냐에 따라 운동을 기술하는 변위 함수는 달라지게 된다. 위에서 밝혔듯 이 문제에선 sine 항과 cosine 항의 선형 결합으로 운동을 기술할 수 있고, 두 함수는 평행 이동 관계에 있기 때문에 일반적인 상황에서는 위상차 [math(\phi )]를 도입해서,
[math( \displaystyle x(t)=A\sin(\omega t+\phi) )]
로 나타나게 되며, 여기서 [math(A )]가 진폭이 된다.
용수철 진자의 속력은 변위 함수를 시간에 대해 한 번 미분하면 구할 수 있다.
[math( \displaystyle \dot{x}(t)=A\omega\cos(\omega t+\phi) )]
가속도는 두 번 미분함으로써 얻는다.
[math( \displaystyle \ddot{x}(t)=-A\omega^{2}\sin(\omega t+\phi) )]
다음으로는 역학적 에너지가 보존되는지 살펴보자. 맨 위에 같은 상황에서 초기 역학적 에너지 [math(E_{0} )]는 탄성에 의한 에너지밖에 없으므로
[math( \displaystyle E_{0}=\frac{1}{2}kA^{2} )]
[math(\textrm{O} )]점으로 부터 변위가 [math(x )]일 때, 물체는 탄성에 의한 역학적 에너지와 운동 에너지 두 개 모두 갖는다.
[math( \displaystyle E=\frac{1}{2}kx^{2}+\frac{1}{2}m{\dot{x}}^{2} )]
따라서
[math( \displaystyle E=\frac{1}{2}k\left[ A\sin(\omega t+\phi) \right]^{2}+\frac{1}{2}m\left[ A \omega \cos(\omega t+\phi) \right]^{2} )]
이때, 위에서 한 정의에 따라 [math(m \omega^{2} =k )]가 되므로
[math( \displaystyle E=\frac{1}{2}k\left[ A\sin(\omega t+\phi) \right]^{2}+\frac{1}{2}k\left[ A\cos(\omega t+\phi) \right]^{2}=\frac{1}{2}kA^{2}=E_{0} )]
로 역학적 에너지는 보존됨을 알 수 있다.
[math( \displaystyle E=\frac{1}{2}kx^{2}+\frac{1}{2}m{\dot{x}}^{2} )]
위 식에서 위상공간 즉, [math(x \text{-} \dot{x} )] 공간에서 개형은 적절히 처리하면, 타원이 된다. 즉, 단순 조화 진동자의 위상도는 아래와 같다.[4]

3.1.1. 초기 조건 문제[편집]
단순 조화 진동자에서 초기 조건 [math(x(0)=x_{0})], [math(\dot{x}(0)=v_{0})]인 경우를 분석해보고자 한다. 윗문단에 나타나 있듯 각진동수 [math(\omega=\sqrt{k/m})]으로 진동하는 단순 조화 진동자의 위치와 속도는
[math(\displaystyle \begin{aligned} x(t)&=C_{1}\sin{(\omega t)}+C_{2}\cos{(\omega t)} \\ \dot{x}(t)&=C_{1}\omega \cos{(\omega t)}-C_{2}\omega \sin{(\omega t)} \end{aligned} )]
[4] [math(x(0)=+A)], [math(\dot{x}(0)=0)]일 때.
이때, [math(x(0)=x_{0})]에서 [math(C_{2}=x_{0})], [math(\dot{x}(0)=v_{0})]에서 [math(C_{1}=v_{0}/\omega)]이다. 따라서 진동자의 위치는 아래와 같이 구해진다.
위에서 같은 각의 삼각함수 합성이 쓰였음을 참고하고, 위에서 밝혔던 '위상차'가 초기 변위와 초기 속도에 의존함을 알 수 있다.
3.1.2. 원운동과의 관계[편집]

위의 그림에서 (a)와 같이 등속 원운동하고 있는 물체를 고려해보자. 이때, 원운동 평면 상에 평행하게 들어오는 평행광선을 고려하고, 이것을 스크린에 비춘다고 생각해보자. 그렇다면, 스크린에는 스크린 평면 상에 투사된 원운동의 자취가 나올 것인데, 이 자취의 위치를 (b)와 같이 [math(\theta(t=0)=0)]이라 두고, 시간 [math(t)]에 따른 위치를 나타내면, 사인곡선의 그래프가 그려지는데, 이것은 곧, 단순 조화 진동자의 시간에 따른 위치 그래프와 같다.
이상에서 단순 조화 진동자의 운동은 원운동을 위와 같이 투사시킨 자취의 운동이라 볼 수 있는 것이다.
이렇게 생각할 경우, 구심력은 곧 조화 진동자의 최고 지점에서의 복원력과 같게 되므로
[math(\displaystyle mr\omega^{2}=kr )]
따라서 조화 진동자의 각진동수가 다음과 같고, 위의 미분 방정식을 이용한 해석과 같음을 얻을 수 있다:
[math(\displaystyle \omega=\sqrt{\frac{k}{m}} )]
3.1.3. 고차원 단순 조화 진동자[편집]
 하위 문서: 조화 진동자/고차원 단순 조화 진동자
하위 문서: 조화 진동자/고차원 단순 조화 진동자 3.2. 감쇠 조화 진동[편집]

이번엔 위의 경우에서 속도 [math(\dot{x} )]에 비례하는 저항력 [math(-b\dot{x} )]가 물체에 작용할 때, 기술되는 운동을 논의해보자. 이때, 운동 방정식은
[math( \displaystyle m\ddot{x}=-kx-b\dot{x}\,\rightarrow \, \ddot{x}+\frac{b}{m} \dot{x}+\frac{k}{m}x=0 )]
이고, 이 방정식은 2계 선형 방정식임에 따라 쉽게 풀린다. 이와 같이
[math( \displaystyle \ddot{x} + {\omega}^{2} x = -2 \beta \dot{x} )]
꼴의 운동 방정식을 가지는 계를 감쇠 조화 진동자(Damped Harmonic Oscillator)라고 한다. 이 방정식의 특성 방정식은
[math( \displaystyle D^2+\frac{b}{m}D+\frac{k}{m}=0 )]
이므로
[math( \displaystyle D=-\frac{b}{2m} \pm \sqrt{ \left( \frac{b}{2m} \right)^2 - \frac{k}{m } } )]
이때, [math(b/2m \equiv \beta)][5]의 감쇠 계수로 정의하면,
[math( \displaystyle D=-\beta \pm \sqrt{ \beta^2 - \omega^{2}} )]
이 됨에 따라 이상에서 이 방정식은 판별식 [math(\displaystyle \beta^2 - \omega^{2} )]의 부호에 따라 다음과 같이 세 가지 형태의 해를 갖는다는 것을 알 수 있다.
우선 경우 ⓐ를 따져보도록 하자. 이 경우에 기술되는 변위 함수는
[math( \displaystyle x(t)=e^{-\beta t}[ C_{1} e^{ \sqrt{ \beta^2 - \omega^{2}} \, t } +C_{2} e^{ -\sqrt{ \beta^2 - \omega^{2}} \, t } ] )]
이다.
다음으로 경우 ⓑ를 따져보면, 그 해는 다음과 같다.
[math( \displaystyle x(t)= e^{-\beta t} [ C_{3}t+C_{4} ] )]
또한, 경우 ⓒ를 따져보면, 다음을 얻는다.
[math( \displaystyle x(t)= e^{-\beta t} [ C_{5}\sin{ ( \sqrt{ \omega^{2}-\beta^2 } \, t ) }+ C_{6}\cos{ ( \sqrt{ \omega^{2}-\beta^2 } \, t ) } ] )]
여기서 [math(C_{1} \sim C_{6})]는 각각 상수이며, 초기조건으로 결정할 수 있다.
경우 ⓐ~ⓒ에 대하여, 마찰 계수 [math(b )]만을 변화시키고, [math(x(0)=A )], [math(\dot{x}(0)=0 )]경우에 대해서 시뮬레이션 해보면, 아래와 같은 지수적으로 감소하는 개형이 나오게 된다.

특히 ⓒ에 대하여 변위 함수 [math(x(t))]는 아래와 같이 두 함수 [math(e^{-\beta t})], [math(-e^{-\beta t})] 사이에 위치하게 되며, 감쇠를 하긴 하지만 각진동수 [math(\omega_{d}\equiv \sqrt{\omega^2-\beta^2})]으로 진동함을 알 수 있다.

이때, ⓑ와 같이 평형점으로 돌아가는 감쇠를 임계 감쇠(Critical damping), ⓐ와 같이 ⓑ와 유사하지만 ⓑ에 비해 느리게 평형점으로 되돌아가는 감쇠를 과대 감쇠[6](Over damping), ⓒ와 같이 진동 형태를 유지하다, 평형점으로 되돌아가는 감쇠를 과소 감쇠[7](Under damping)라 한다. 이때, ⓐ, ⓑ는 계가 비진동성으로 응답하는 것을 알 수 있다.
이때, 아래와 같은 조건에 따른 감쇠 형태로 분류된다.
감쇠 조화 진동자의 위상공간 즉, [math(x \text{-} \dot{x} )] 공간에서 그래프는 아래와 같은 개형을 가진다.[8]

위상 공간의 개형을 보면 역학적 에너지는 보존되지 않는다는 사실[9]을 알 수 있는데, 이것은 마찰력이라는 비보존력이 계에 작용하고 있음을 상기하면, 당연한 결과라는 사실을 알 수 있다.
3.3. 강제 조화 진동[편집]

조화 진동자에 외부 힘 [math(F(t))]가 작용할 때, 이 계의 운동 방정식은
[math( \displaystyle m \ddot{x} + b \dot{x} + k x = F(t) )]
와 같이 나타나게 된다. 이러한 운동 방정식을 가지는 계를 강제 조화 진동자(Driven Harmonic Oscillator)라고 한다. 흔히 볼 수 있는 예시로 일정한 주기로 그네를 밀어주는 경우를 생각할 수 있다. 여기서 외부 힘에 해당하는 [math(F(t))]를 강제 조화 진동자의 구동력(Driving Force)라고 한다.
3.3.1. 사인형 구동력[편집]
가장 간단한 강제 조화 진동의 예시로, 외부 구동력이 cosine형 [math(F_{0}\cos{\omega't} )]으로 주어진다고 하자. 이렇게 되면, 운동 방정식은 다음과 같이 세워지게 된다.
[math( \displaystyle m\ddot{x}=-kx-b\dot{x}+F_{0}\cos{\omega't}\,\rightarrow \, \ddot{x}+\frac{b}{m} \dot{x}+\frac{k}{m}x=\frac{F_{0}}{m}\cos{\omega't} )]
이때, [math(\sqrt{k/m} \equiv \omega )], [math(F_{0}/m \equiv G_{0} )], 윗 문단에서 언급한 감쇠 계수 [math(\beta )]를 도입하면, 위의 미분 방정식은
[math( \displaystyle \ddot{x}+2\beta \dot{x}+\omega^{2} x=G_{0}\cos{\omega't} )]
이 되며, 이 방정식은 특이해 [math(x_{p}(t) )]와 정상해 [math(x_{c}(t) )]의 선형 결합으로 이루어진다. 이것의 의미는 후술하기로 한다.
우선 특이해를 구하자. 오일러 공식을 이용하여,
[math( \displaystyle \ddot{X}+2\beta \dot{X}+\omega^{2} X=G_{0}e^{i \omega ' t} )]
으로 식을 바꾼 뒤, 예상되는 특이해 [math(X_{p}(t)=C e^{i \omega ' t} )]를 대입하면,
[math( \displaystyle (-{\omega '}^{2}+2 \beta \omega ' i+\omega^{2})Ce^{i \omega ' t}=G_{0}e^{i \omega ' t} )]
이상에서
[math( \displaystyle C=\frac{G_{0}}{(\omega^{2}-{\omega '}^{2})+2{\beta}i \omega '}=\frac{ [ (\omega^{2}-{\omega '}^{2})-2{\beta}i \omega ' ]G_{0}}{(\omega^{2}-{\omega '}^{2})^{2}+4{\beta}^{2} {\omega '}^{2}} )]
이때, [math(C )]를 극형식으로 나타냄으로써, 다음을 얻는다.
여기서 [math(\phi )]는 구동력과 그 응답으로 나타나는 운동에 대한 위상차이다. 따라서 특이해는
[math( \displaystyle X_{p}(t)=\frac{G_{0}}{\sqrt{{(\omega^{2}-{\omega '}^{2})}^{2}+4{\beta}^{2} {\omega '}^{2} } }e^{i(\omega ' t-\phi)} )]
인데, 우리가 구하는 것은 물리현상이므로 실수부만 해로 취급하면, 본래의 미분방정식의 특이해는
[math( \displaystyle x_{p}(t)=\frac{G_{0}}{\sqrt{{(\omega^{2}-{\omega '}^{2})}^{2}+4{\beta}^{2} {\omega '}^{2} } }\cos{(\omega ' t-\phi)} )]
정상해 [math(x_{c}(t) )]는 미분 방정식의 우변이 [math(0 )]이 되는 해로써, 이것은 감쇠 진동에서 구했던 해와 같다. 즉, 정상해는 진동계 자체의 진동 효과를 기술한다는 것을 알 수 있다. 또한, 정상해의 경우 윗 문단에서 보았듯, 감쇠항 [math(\exp{(-\beta t)} )]이 있어 [math(t \,\rightarrow \, \infty )]일 때, [math(x_{c}(t) \, \rightarrow \, 0 )]이 됨에 따라 시간이 매우 지난 후에 계의 운동을 기술하는 변위 함수는
[math( \displaystyle x(t) \,\rightarrow \, x_{p}(t)=\frac{G_{0}}{\sqrt{{(\omega^{2}-{\omega '}^{2})}^{2}+4{\beta}^{2} {\omega '}^{2} } }\cos{(\omega ' t-\phi)} )]
가 된다. 이것은 곧 초반에는 정상해 항이 존재하기 때문에 계 자체의 진동과 외부 구동력에 의한 진동 두 효과가 동시에 나타나다([math(x(t)=x_{p}(t)+x_{c}(t))]) 시간이 많이 지나면, 결국 계는 외부 구동력의 효과만 남게 된다.([math(x(t)\to x_{p}(t))])
아래의 그림은 위 과정을 시각화한 것이다. 아래와 같이 강제 조화 진동은 진동계 자체의 진동 효과인 [math(x_{c}(t))]와 외부 구동력에 의한 진동 효과 [math(x_{p}(t))]의 선형결합으로 주어진다는 것을 알 수 있다.

이번에는 이 운동의 위상차에 대한 것을 고려해보도록 하자. 강제 조화 진동자의 위상차는
[math( \displaystyle \phi=\arctan{\left ( \frac{2{\beta} \omega '}{\omega^{2}-{\omega '}^{2}} \right )} )]
임을 보았다. 따라서 이는 아래와 같이 요약할 수 있다.
- [math(\boldsymbol{\omega \gg \omega'})]: [math(\phi \to 0)]이므로 외부 구동력과 그 응답으로 나타나는 진동계의 운동의 위상은 거의 비슷하다.
- [math(\boldsymbol{\omega \approx \omega'})]: [math(\phi \approx \pi/2)]이므로 그 응답으로 나타나는 진동계의 운동의 위상은 외부 구동력의 위상의 [math(-\pi/2)]만큼 차이난다.
- [math(\boldsymbol{\omega \ll \omega'})]: [math(\phi \to \pi)]이므로 그 응답으로 나타나는 진동계의 운동의 위상은 구동력의 위상에 반전되어 나타난다.([math(-\pi)]의 위상차를 가진다.)

다음으로는 이 계의 공명에 대해 생각해보자. 시간이 매우 지난 뒤, 계는 진폭
[math( \displaystyle \frac{G_{0}}{\sqrt{{(\omega^{2}-{\omega '}^{2})}^{2}+4{\beta}^{2} {\omega '}^{2} } } \equiv A )]
로 진동하게 된다. 이것이 어떤 각진동수 [math(\omega_{r} )]에서 최대가 될 조건은
[math( \displaystyle \left. \frac{{\rm d}A}{{\rm d} \omega '} \right|_{\omega '=\omega_{r}}=0 )]
을 만족해야 하므로
[math( \displaystyle \omega_{r}=\sqrt{{\omega}^{2}-2{\beta}^{2}} )]
일 때, 공명이 일어나게 된다. 감쇠 조화 진동자의 각진동수 [math(\omega_{d})]와 유사하지만 [math(\beta)]의 계수가 2임에 유의한다.
아래는 외부 구동력의 진동수에 따른 계의 진폭을 그래프로 나타낸 것이다.

흥미로운 것은 만약 계의 감쇠 계수가 매우 작아지면, 공명 진동수는 [math(\omega )]로 수렴하게 되며, 이때, 진폭은 [math(\infty )]로 발산한다. 즉, 진폭이 급격히 커져 진동계 자체가 파괴될 수 있다.
이와 관련해서, 물체의 기본 진동수로 접근하는 구동력을 물체에 가하면, 물체는 급격한 진동을 일으켜, 물체가 파괴될 수 있는 것을 간접적으로 알 수 있게 한다.[10]
3.3.2. 주기적 구동력[편집]
이 문단에서는 cosine형 구동력이 아닌 임의의 주기적인 구동력 [math(F(t))]가 주어지는 경우를 보고자한다. 이 경우 운동 방정식은
[math( \displaystyle m\ddot{x}=-kx-b\dot{x}+F(t)\,\rightarrow \, \ddot{x}+\frac{b}{m} \dot{x}+\frac{k}{m}x=\frac{F(t)}{m})]
[10] 이것의 예로는 '목소리로 와인잔 깨기' 등이 있다.
와 같이 세워질 것이다. 우리는 앞서 [math(F(t))]를 주기적인 구동력이라 가정했고, 이에 따라
[math( \displaystyle \begin{aligned} F(t)&=\sum_{n=0}^{\infty}a_{n} \sin{(n \omega' t)}+\sum_{n=0}^{\infty}b_{n} \cos{(n \omega' t)} \\ a_{n}&=\dfrac{\omega'}{\pi} \int_{0}^{2\pi/\omega'} F(t')\sin{(n \omega' t')}\,{\rm d}t' \\ b_{n}&=\dfrac{\omega'}{\pi} \int_{0}^{2\pi/\omega'} F(t')\cos{(n \omega' t')}\,{\rm d}t' \end{aligned})]
의 푸리에 급수로 전개할 수 있다. 따라서 우변은 곧 무한한 개수의 sine형 구동력이 중첩되어있는 상황으로 해석할 수 있고, 해는
[math( \displaystyle x(t)=x_{c}(t)+\sum_{n=0}^{\infty} X_{n}(t)+\sum_{n=0}^{\infty}Y_{n}(t) )]
의 형태로 주어짐을 알 수 있다.[11] 여기서 [math(X_{n})], [math(Y_{n})]은 각각 sine항, cosine항의 특이해이며, [math(x_{c})]는 정상해이다.
그런데 위의 결과를 살펴보면,
으로 쓸 수 있다.[12] [math(\phi)]와 관련된 것은 외부 구동력과 그 응답으로 나타나는 운동에 대한 위상차이다.
이상에서
[math( \displaystyle x(t)=x_{c}(x)+\sum_{n=0}^{\infty} A_{n} \cos{(n \omega' t-\phi_{X_{n}})}+\sum_{n=0}^{\infty}B_{n} \cos{(n \omega' t-\phi_{Y_{n}})} )]
임을 알 수 있다.
이 결과를 이용하면, 외부 구동력이 구형파나 삼각파, 톱니파 형태인 경우에도 변위함수를 구할 수 있다.
아래는 [math(F(t))]가 아래와 같은 사각파 형태일 때 시뮬레이션 해본 것이다. (조건은 임의대로 설정)

3.3.3. 일반적 구동력[편집]
멈춰 있던 물체 ([math(x(-\infty)=\dot{x} (-\infty) = 0)])에 일반적인 구동력 [math(F(t))]을 가했을 때 조화 진동자의 움직임을 계산하는 것은 결국 다음 운동 방정식을 푸는 것과 같다.
[math( \displaystyle \ddot{x} + 2 \beta \dot{x} + \omega^2 x = \frac{F(t)}{m} )]
윗 문단에서 구동력이 주기함수일 때 [math(F(t))]를 푸리에 급수로 나타냈듯이, 일반적으로 [math(F(t))]는 다음과 같이 디랙 델타 함수들의 결합으로 나타낼 수 있다.
[math( \displaystyle \frac{F(t)}{m} = \int_{-\infty}^{\infty} { F(t') \frac{\delta (t - t')}{m} \,{\rm d}t'} )]
이것은 디랙 델타 함수의 정의에 의해 자명하다. 따라서, 다음 방정식
[math( \displaystyle \ddot{x} + 2 \beta \dot{x} + \omega^2 x = \frac{\delta(t - t')}{m} )]
을 초기 조건 [math(\displaystyle x(-\infty) = \dot{x} (-\infty)=0)]에서 풀었을 때의 해를 [math(x(t) = G(t\,, t'))]라고 한다면, 운동 방정식은 선형 미분방정식이므로 우변이 [math(F(t)/m)]일 때의 해는 다음과 같다.
[math( \displaystyle x(t) = \int_{-\infty}^{\infty} {F(t') G(t,\, t') \,{\rm d}t'} )]
이때 [math(G(t,\, t'))]를 조화 진동자에 대한 그린 함수(Green's function)라고 한다. 이는 물체를 시각 [math(t=t')]에 툭 쳐서 충격량 1을 주었을 때 물체의 움직임과 같다. 이것을 구하는 방법은 다양한 방법이 있으며, 라플라스 변환을 응용하면 어렵지 않게 풀 수 있다. 그 결과는 다음과 같다.
[math( \displaystyle G(t,\, t') = \frac{1}{m \omega_d} e^{-\beta (t-t')} \sin \left( \omega_d (t-t') \right) u(t-t') )]
이때 [math(u(t))]는 헤비사이드 계단함수이며, [math(\omega_d = \sqrt{\omega^2 - \beta^2})]이다. 따라서 이를 대입하면 일반적인 구동력 [math(F(t))]에 대하여 다음과 같이 운동 방정식의 해를 구할 수 있다.
이 방법은 구동력이 어떻게 주어지든 적분 한 번으로 물체의 움직임을 완벽하게 계산할 수 있다는 장점이 있지만, 단점은 대부분의 경우 그 적분이 매우 복잡해진다는 점이 있다.
4. 응용[편집]
4.1. 용수철 진자[편집]

용수철 진자는 용수철 진동자를 세운 버전이라 볼 수 있다.
위 그림의 (가)와 같이 용수철 상수가 [math(k )]인 가벼운 용수철만을 매달아 놓는다면, 용수철은 자연 길이[13]를 유지한다. 그러나, (나)와 같이 질량 [math(m )]의 물체를 조심스레 용수철에 연결하게 되면, 중력 때문에 용수철은 늘어나고, 탄성력과 중력이 평형을 이룰 때까지 늘어난다. 즉, 위 그림에서
이며, 실제 실험할 때는 용수철 상수를 모르기 때문에 이렇게 용수철에 물체를 매달아 늘어난 길이 [math(\alpha )]를 측정하여,
[math( \displaystyle k=\frac{mg}{\alpha} )]
를 이용하여 용수철 상수를 구한다.
반동이 가해지지 않는 이상 (나) 상태에서 용수철 진자는 힘의 평형이 이루어져, 정지하게 된다. 따라서 용수철 진자의 평형점은 (나)에서 O이다. 그런데 (다)처럼 평형점을 기준으로 [math( \displaystyle x )]만큼 늘어났을 때, 물체의 운동은 어떻게 기술되는 지 알아보자.
물체가 받는 힘은 자신의 중력과 탄성력이다. 중력 방향을 양으로 두면, 따라서 운동 방정식은
[math( \displaystyle m \ddot{x}=-k(x+\alpha)+mg )]
이고, 이것을 다시 쓰면,
[math( \displaystyle \ddot{x}+\frac{k}{m}x=-\frac{k\alpha}{m} +g=0 )]
으로 용수철 진동자와 같게 기술되는 것을 알 수 있다. 따라서 용수철 진자는 주기
[math( \displaystyle T=2\pi \sqrt{\frac{m}{k}} )]
으로 진동하며, 초기에 점 O를 기준으로, [math( \displaystyle x_{0} )]만큼 늘렸다면,
[math( \displaystyle x(t)=x_{0}\sin{\biggl( \sqrt{\frac{k}{m}} t+\phi \biggr)} )]
가 된다. 여기서 [math(\phi )]는 위상차이다.
이때, 물체의 속도와 가속도는 각각 다음과 같다.
[math( \displaystyle \dot{x}(t)=x_{0} \sqrt{\frac{k}{m}} \cos{\biggl( \sqrt{\frac{k}{m}} t+\phi \biggr)} )]
[math( \displaystyle \ddot{x}(t)=- \frac{k}{m}x_{0} \sin{\biggl( \sqrt{\frac{k}{m}} t+\phi \biggr)} )]
이번에는 역학적 에너지가 보존되는지 확인해보자. (나) 상황에서 O의 높이를 [math( \displaystyle 0 )]이라 잡으면, O를 기준으로 [math( \displaystyle x_{0} )]만큼 늘렸을 때, 물체의 역학적 에너지는 용수철의 탄성 에너지와 중력 퍼텐셜 에너지의 합이다.
[math( \displaystyle E_{0}=\frac{1}{2}k(x_{0}+\alpha)^{2}-mgx_{0} )]
이때, (다) 상황에서 물체의 역학적 에너지는
[math( \displaystyle E=\frac{1}{2}k (x+\alpha)^{2}+\frac{1}{2}m {\dot{x}}^{2}-mgx )]
위에서 구한 변위 함수와 속도 함수를 대입해서 전개해보면, [math(E=E_{0} )]의 결과를 얻으므로 용수철 진자에서도 역학적 에너지는 보존된다는 사실을 확인할 수 있다.
4.1.1. 용수철의 연결[편집]
이 문단에서는 용수철의 직렬 연결과 병렬 연결에 대해서 기술한다. 이는 위의 예시인 용수철 진자의 경우에도 적용할 수 있다. 아래의 그림은 예로써 용수철 상수가 각각 [math(k_{1})], [math(k_{2})]인 두 용수철을 (a) 직렬 연결, (b) 병렬 연결 했을 때의 모습이다.

이 계는 단일 용수철이 진동하는 계로 대치할 수 있다. 용수철의 탄성력은 물체(질점)에 바로 가해진다고 가정한다.
4.1.1.1. 직렬 연결[편집]
[math(n)]개의 용수철을 직렬 연결했다고 생각해보자. 이때, [math(j)]번째 용수철의 용수철 상수는 [math(k_{j})]이다. 용수철에 연결된 물체에 [math(F)]의 힘을 가하여 [math(j)]번째 용수철을 [math(\Delta x_{j})]만큼 늘렸다고 생각해보자. 이때, 모든 용수철에선 탄성력을 발생시키며, 그 크기는 [math(F)]로 같다.[14][15] 따라서
[math(\displaystyle F=k_{j}x_{j} \,\to\, x_{j}=\frac{F}{k_{j}} )]
이 성립한다. 모든 용수철의 늘어난 길이의 합 [math(\displaystyle \sum_{j=1}^{n} \Delta x_{j}=\Delta x )]라 하자. 그런데
[math(\displaystyle \Delta x= \sum_{j=1}^{n} \frac{F}{k_{j}} \,\to\, F=\left[ \sum_{j=1}^{n} \frac{1}{k_{j} } \right]^{-1}\cdot \Delta x )]
이상에서 용수철을 직렬로 연결했을 때는 용수철 상수가 [math(\displaystyle \left[ \sum_{j=1}^{n} \frac{1}{k_{j}}\right]^{-1})]인 용수철을 연결한 상황과 동일함을 알 수 있다. 저항에서 병렬 연결되었을 때 합성 저항을 구하는 것과 동치이다.
4.1.1.2. 병렬 연결[편집]
[math(n)]개의 용수철을 병렬 연결했다고 생각해보자. [math(j)]번째 용수철의 용수철 상수는 [math(k_{j})]이고, 자연 길이는 [math(L_{j})]이다. 용수철의 자연 길이가 다르므로 용수철을 물체에 연결할 때, 용수철은 늘어나거나 줄어든다. 용수철을 물체에 연결했을 때, 평형 상태의 물체의 위치를 [math(X_{0})]라 하자. 각 용수철의 변위는 [math(L_{j}-X_{0})]이므로 다음이 성립한다.
[math(\displaystyle 0=\sum_{j=1}^{n} k_{j} [L_{j}-X_{0}] \,\to \, {\displaystyle \sum_{j=1}^{n} k_{j}L_{j} }=X_{0}{\displaystyle \sum_{j=1}^{n} k_{j}} )]
이 평형 위치로 부터 물체를 [math(F)]의 힘을 가하여 [math(\Delta x)]만큼 늘였다고 생각하자. 용수철의 모든 탄성력의 합은 이 [math(F)]의 합과 같다.
[math(\displaystyle \begin{aligned} F&=\sum_{j=1}^{n} k_{j}[\Delta x-L_{j}] \\ &=\sum_{j=1}^{n} k_{j} \Delta x -\sum_{j=1}^{n} k_{j} L_{j} \\&=\left[ \sum_{j=1}^{n} k_{j} \right] (\Delta x-X_{0}) \end{aligned} )]
단일 용수철 계로 생각할 때, [math(\Delta x-X_{0})]는 평형 위치로 부터 늘어난 길이라 볼 수 있으므로 곧 이 계는 용수철 상수 [math(\displaystyle \sum_{j=1}^{n} k_{j})]인 용수철이 연결되었다고 볼 수 있다. 저항에서 직렬 연결되었을 때 합성 저항을 구하는 것과 동치이다.
4.2. 진자[편집]
 자세한 내용은 진자 문서를 참고하십시오.
자세한 내용은 진자 문서를 참고하십시오. 진자(pendulum)의 경우 엄밀하게 말하면 운동 방정식이 [math(\ddot{x}+\omega^2 x = f(t))] 꼴이 아니기 때문에 조화 진동자가 아니다. 그러나 진자의 진폭이 충분히 작은 경우에 대하여 조화 진동자로 근사할 수 있고, 같은 분석을 적용할 수 있다. 자세한 내용은 진자 문서 참조.
4.3. 지구 관통 터널[편집]

위 그림과 같이 지구 중심 [math(\text{O} )]를 지나가는 무지막지하게 뜨거운 직선형 터널을 뚫었고, 물체를 가만히 놓았을 때, 물체의 운동을 분석해보자. 문제를 간단히하기 위해 모든 마찰은 무시하고, 지구는 구형이며, 밀도 [math(\rho )]는 균일하며[16], 터널의 직경 [math(L )]은 지구 반경에 비해 무시 가능할 정도로 작다고 생각할 것이다. [math(m )]은 물체의 질량이다.
지구 중심 [math(\text{O} )]를 기준으로 하여, 윗 방향을 [math(+\hat{\mathbf{x}} )]라 놓자. 이때, 물체가 변위 [math(x )]에 위치할 때, 터널의 직경이 매우 작으므로 물체는 지구 내부에 위치한다고 생각할 수 있고, 힘은 물체를 지나고, 중심이 [math(\text{O} )]인 지구의 부분 질량에 의한 만유인력이다.[17][18]
[math( \displaystyle \mathbf{F}=- G \frac{m}{x^2} \left( \rho \cdot \frac{4}{3} \pi x^{3} \right) \hat{\mathbf{x}}=- \frac{4G \pi \rho m}{3} {\mathbf{x}} )]
이 된다. [math(G )]는 만유인력 상수이다.
따라서 물체의 운동 방정식은
[math( \displaystyle m \ddot{x}=- \frac{4G \pi \rho m}{3} x \,\rightarrow \, \ddot{x}+ \frac{4G \pi \rho}{3} x=0 )]
따라서 물체는 주기
[math( \displaystyle T=2\pi \sqrt{\frac{3}{4G \pi \rho }}=\sqrt{\frac{3 \pi}{G\rho}} )]
로 진동운동 함을 알 수 있다. 따라서 물체를 초기에 [math(x_{0} \leq R )]인 지점에서 떨어뜨렸다면, [math(-x_{0} \leq x \leq x_{0} )]에서 진동하게 된다.
따라서 위 결과로 지구의 한 표면에서 대척점의 표면까지 이동하는데 걸리는 시간은 위에서 구한 주기의 반이므로
[math( \displaystyle \frac{T}{2}=\frac{1}{2}\sqrt{\frac{3 \pi}{G\rho}} )]
가 되고, 각종 상수
- [math(G=6.67384 \times 10^{-11} \, \mathrm{N} \cdot \text{m}^{2} / \mathrm{kg}^{2} )]
- [math(\rho=5515 \,\mathrm{kg}/\mathrm{m}^{3} )]
[math( \displaystyle \frac{T}{2} \approx 42.2\,\mathrm{min} )]
가 됨을 알 수 있다.
더 나아가 터널을 비스듬히 파서, 중심을 지나지 않더라도 주기는 모두 같게 나온다. 증명은 위와 같은 방법으로 하면 된다.
4.4. 액체관 진동[편집]
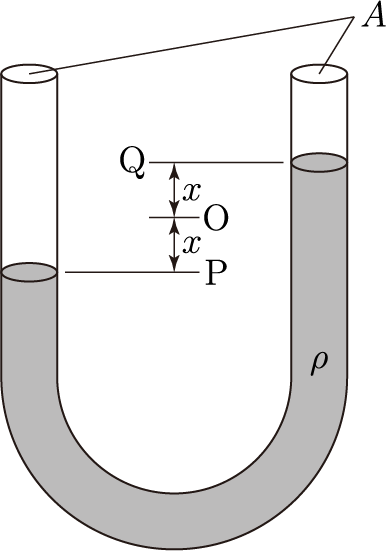
그림과 같이 단면적이 [math(A )]인 U자관에 밀도가 [math(\rho )]인 액체가 길이 [math(l )]만큼 차있는 것을 고려하자. 문제를 단순하게 생각하기 위해 모든 마찰 및 액체의 점성은 무시한다.[19] 관에 든 액체의 질량은 밀도와 부피의 곱으로 쓸 수 있으므로
[math( \displaystyle m = \rho Al )]
[19] 점성을 넣는 순간 식에 나비에-스토크스 방정식이라는 일반해조차 아직 안 나온 골칫거리를 넣어야 하기 때문.
이때, 한쪽이 평형점 O를 기준으로 [math(x )] 만큼 눌러졌을 때, 작용하는 복원력은 [math(2x )]만큼의 액체 기둥에 작용하는 중력이다. 따라서 운동 방정식은 다음과 같이 쓸 수 있다.
[math( \displaystyle \rho Al \ddot{x}=-\rho A g \cdot 2x )]
이것을 다시 쓰면,
[math( \displaystyle \ddot{x}+\frac{2g}{l} x=0 )]
이고, 이것은 명백히 주기
[math( \displaystyle T= \pi \sqrt{\frac{2l}{g}} )]
로 진동하는 용수철 진동자의 진동 방정식과 같다.
따라서 액체 기둥은 위와 같은 주기로 진동함을 알 수 있다.
4.5. 전자기 진동[편집]
 자세한 내용은 RLC 회로 문서를 참고하십시오.
자세한 내용은 RLC 회로 문서를 참고하십시오. 4.6. 양자 조화 진동자[편집]
자세한 내용은 양자 조화 진동자 문서를 참고하십시오. 후크 법칙을 만족하는 계도 양자역학에서는 뉴턴의 운동 법칙이 아닌 슈뢰딩거 방정식에 의해 기술되므로, 본 문서에서 다룬 조화 진동자와는 다른 종류의 방정식으로 설명해야 한다. 자세한 내용은 문서 참조.
5. 관련 문서[편집]
 이 문서의 내용 중 전체 또는 일부는 2023-12-17 05:24:16에 나무위키 조화 진동자 문서에서 가져왔습니다.
이 문서의 내용 중 전체 또는 일부는 2023-12-17 05:24:16에 나무위키 조화 진동자 문서에서 가져왔습니다.